Trådlös, hinder upptäcka, pipa roboten med Arduinos! (3 / 11 steg)
Steg 3: Att göra Motor sköld: översikt



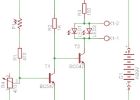
Titta på en av motorshield schema jag hittade (adafruit en) såg jag att de flesta av de komponenter som krävs var lätt tillgängliga på min lokala elektronik butik och efter att ha gjort lite för att beräkna såg att jag skulle löda en för en tredjedel av kostnaden!
Jag insåg också att jag kunde spara några pwm stift på Arduino (4 totalt) genom att ändra sköld anslutningarna lite. Istället för att ansluta 4 aktiverar stiften i L293Ds till 4 Digital stift på Arduino, jag gick direkt förbi dem till + 5V via en 10 K Ohm motstånd.
Detta innebar att jag kunde spara 4 pwm stift på Arduino... men du förlorar förmågan att kontrollera rotationshastigheten av motorerna (jag behövde så det var fina!).
En annan sak som skiljer sig från den sköld schematiskt är att istället för en 10 K resistannce buss jag har lödda 10 individuella 10 K Ohm motstånd eftersom ingen av affärerna hade en motstånd buss. (Gå för motstånd bussen om du får it...much lättare att löda!)
Så får din lödkolvar uppvärmd... vi har en motor sköld att bygga!
Obs: du kan hoppa över till steg 6 om du har en färdiga motor sköld!

Lägg till hinder upptäcka morrhår på din Robot

Lättare upptäcka 433 MHz RF Arduino Smart mörkar

Enkla mörkt upptäcka LED robotens ficklampa

Rörelse upptäcka konfetti Bomb

Hinder att undvika Robot med arduino

Arduino tal kontrollera och upptäcka hinder Robot

Underwater metall upptäcka för skeppsbrott Treasure

Hemlig knackning upptäcka låda Lock(origional)

Upptäcka cirklar med OpenCV och Python

ULTIMATE Guide på hur man upptäcker vägglöss | Upptäcka en säng bugg angrepp
Automatisk night-upptäcka skåp ljus

Upptäcka falska polymer vietnamesiska pengar

Att skapa Bookhuddle.com, en webbplats för att upptäcka, organisera och dela bokinformation

Oförstörbar tummen upptäcka handla Stein

Pokemon upptäcka armband

Lätt att göra flytande sil för metall upptäcka
Dark upptäcka nattlampan

Mänskliga upptäcka rådjur skalle ljuset
