3D tryckt Arduino Boe Bot (1 / 6 steg)
Steg 1: Få hårdvara delar









Obs: Du behöver inte få exakt samma delar visas nedan. Som du kan få andra 360 servon, men du kan behöva byta ut saker som mått på 3D ram. Jag rekommenderar att använda ett skjutmått mäta om du får andra delar
MAIN HÅRDVARA:
Parallax kontinuerlig Rotation Servo x2
Parallax Servo hjul 66.5 mm Diameter, 7,6 mm bredd x3
Ardunio Uno R3 och USB-b sladd och dator med Arduino IDE
Mini Lödfritt set av brödunderläggen
Runt 20 hane-hane jumper kablar
batterihållare 4xAA
9V batterihållare med DC-kontakten
4xAA batterier och 1x9v
Bra lim och eller eltejp
Gem eller PIN-kod
Ultrasonic autonoma hårdvara alternativ:
Parallax kontinuerlig Rotation Servo x1
Ultrasonic sensor (HC-SR04)
Remote RF sändare/mottagare Styrspaksreglage hårdvara alternativ:
En annan Arduino
En annan dator skulle vara trevligt att testa sändande och mottagande med Arduino IDE
Skärbräda
Ytterligare ett 9v batteri
En annan 9v batterihållare med DC plug
Mer hane-hane hoppare ledningar
Tumme JoyStick
RF Link sändare - 434MHz eller 315MHz
RF länk mottagare - 4800bps 434MHz eller 315MHz Obs: både sändare och mottagare måste vara på samma frekvens att arbeta
För denna tutorial kommer jag att göra det RF-sändare/mottagare Joystick kontroll hårdvara alternativ. Om du vill göra ultraljud autonoma hårdvara alternativ. Du kan antingen skrika på mig i kommentarerna till lägga till den i denna handledning eller räkna ut hur man gör det själv.

BOE Bot/Arduino raden efter robot

3D tryckt kropp för Parallax BOE-Bot robot...

Parallax BoE-Bot fjärrkontrollen drivs av Afero

PING huvud BOE-Bot...

Hur man gör en Parallax BOE-Bot använda grundläggande stämpel Chip

Spela musik på din Boe-bot
Parralex Ping))) församling med boe-bot

Enkla 3D tryckt Arduino Robot

3D tryckt Arduino Robot
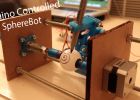
3D tryckt Arduino kontrollerade Eggbot/Spherepot

3D tryckt Arduino xylofon

Autonomus vägg följande hinder att undvika Arduino Rescue Bot

Använda en PS3 Controller för att styra en Arduino NXT Bot

3D tryckta Arduino Tank
Hexapoduino: liten hexapod 3D tryckt, Arduino kontrollerade

Arduino Bluetooth-Bot med Android och LED-

3D tryckt Arduino Quadricopter

Hur man gör en mobiltelefon och dator kontrolleras 3D tryckta Robot med Arduino - IoBot.
