6WD robot med aluminiumchassi (4 / 7 steg)
Steg 4: Elektronik, hjärnan och mottagare.





















Jag hoppas att du har en grundläggande erfarenhet av elektronik, iallafall det är knappast nödvändigt att använda lodet.
Material som behövs för denna del:
• Litiumbatteri 3s av 4000 mah.
• En digital elektronisk växel. Detta element är inte absolut nödvändigt, men det är bekvämt för mer sistnämnd f8orlängningar. För den aktuella församlingen, kan den ersättas med en enkel switch kan hantera minst 10 ampere.
http://www.generationrobots.com/en/400930-6x6-Wild...
• En Arduino Mega 2560 styrelse.
http://Tienda.bricogeek.com/Arduino/306-Arduino-me...
• En reglerad XBee Explorer styrelse
http://Tienda.bricogeek.com/modulos-radiofrecuenci...
• En XBee Pro 60mW ombord med antenn
http://Tienda.bricogeek.com/modulos-radiofrecuenci...
• En Sabertooth styrelsen 12A dubbla motorn förarens
http://www.dimensionengineering.com/products/Saber...
• En ULN 2803 och IC-uttaget
För att underlätta montering, börja genom att släppa aluminium plattan av chassit.
• Rita på aluminium plattan tre axlar motsvarar yxorna av motorerna (röd färg)
• Plats i 3s litiumbatteri i mitten av första två röda axlar och tre elektriska kontakter.
• Sedan bifoga den elektroniska switchen om du valt att använda den.
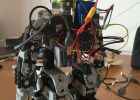
• Fortsätta med Arduino Mega styrelse. Först, löda tre kablar i den nedre delen av plattan: röd till Vin, svart till de två gnd på sidan, och vita till TX1, pin-18. Se bilden. Var försiktig med position, försöker placera USB-kontakten rätt i mitten av de två röda axlarna på höger sida, för att komma åt USB-kontakten från utanför bekvämt mellan hjulen och att kunna programmera styrelsen vid behov. Bifoga styrelsen med sex bultar och två nötter att varje bult för att separera aluminium plattan. Lägga till en plastbricka för att förhindra kortslutning. Sedan, fäst styrelsen med en enda plast mutter.
• Placera slutligen sabertooth styrelsen på samma nivå med aluminium plattan med hjälp av fyra bultar och muttrar. Den aluminium plattan är för kylning.
• Se alla nödvändiga anslutningar. Hänvisa till ritningen.
• Anslut den ta emot modulen XBee i Explorer reglerade styrelsen och göra fyra krävs anslutningar: 5v till 5v, gnd till gnd, buller till TX3 (stift 14) och Dout till RX3 (pin 15).
• Slutligen, använda en tryckt krets holmar, konstruera den krets som styr främre LED lampor, som i systemet i ritningen.

Billiga 4WD invända att undvika Robot med fyra IR närhet sensorer...

Bygga din Internet kontrollerad Video-Streaming Robot med Arduino och Raspberry Pi

Lägga till Internet-kontroll i Raspberry Pi Robot med Runmyrobot.com

2-wheel Self Balancing Robot med hjälp av Arduino och MPU6050

Grundläggande raden efter Robot med Arduino

Labyrint Problemlösaren Robot, med artificiell intelligens med Arduino

Bygga en Robot med Perler pärlor

Styra din Robot med hjälp av mobiltelefon

Avlägsen kontrollerade robot med mobila video inspelningen

Styra din Robot med en Wii Nunchuck (och en Arduino)

Cool ROBOT: med magiska LED krafter

Bygga en Robot med MSP430 Launchpad
Hur man bygger en Raspberry Pi noll Humanoid Robot med Java

LINUSBot - rad efterföljare Robot - med PID control

Raspberr Pi Robot-en Hybrid Robot med Advance funktioner
Skapandet av en vandrande robot med polycaprolactone

Enkla självbalanserande Robot med Galileo Gen 2

Arduino-baserad rad efterföljare robot med hjälp av Pololu kvart-8RC line sensor
