6WD robot med aluminiumchassi (7 / 7 steg)
Steg 7: Slutsats och förbättring projekt
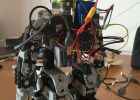
Fysiska egenskaper:
Övergripande dimensioner av robot: 42 cm längd, 32 bredd och 12,5 höjd.
Vikt: 3,430 kg.
Hastigheten beror på motorerna. Min föreslagna 100: 1 växel minska når det 0.7 m/s (2.4 km/timme). Om du minskar den redskap minskningen, ökar hastigheten samtidigt som man minskar dragkraft. Tvärtom om du ökar minskning: långsam fart men ökad dragkraft. I filmerna kan du se off-road funktionerna, kraftigt beroende på vilken typ av yta som du är, är hjulen mycket lämplig för branta backar för deras stor dragkraft.
Mycket viktigt:
LED lamporna har polaritet, så om de inte är korrekt anslutna de inte fungerar. Du kommer att behöva vända anslutningarna.
Ett hjul tur i motsatt riktning. För att fixa det, bara vända kablarna som mata motorn.
Om hela gruppen av tre motorer roterar i motsatt riktning, bara vända anslutningarna av gruppen i drivrutinen "Sabertooth".
Om problemet är att de vänder sig fungera motsats som förväntat, är den enklaste fix att utbyta parar av kraftkabel i drivrutinen "Sabertooth".
Föraren Sabertooth har en spänning sensor för litiumbatteri, som skyddar det mot för låga värden som skulle vända den värdelös. Därför, om den fungerar väl och på några peka den stannar, testa spänningen i batteriet och ladda det om det behövs.
Som nästa förbättringar har jag satt mig själv två mål:
• Lägg till en liten kamera och en audio-video sändare som används i aeromodelling.
• Design och implementation av en robotarm.
Och naturligtvis alla de bidrag och förslag blir mycket väl mottagna, hälsningar och se dig snart.

Billiga 4WD invända att undvika Robot med fyra IR närhet sensorer...

Bygga din Internet kontrollerad Video-Streaming Robot med Arduino och Raspberry Pi

Lägga till Internet-kontroll i Raspberry Pi Robot med Runmyrobot.com

2-wheel Self Balancing Robot med hjälp av Arduino och MPU6050

Grundläggande raden efter Robot med Arduino

Labyrint Problemlösaren Robot, med artificiell intelligens med Arduino

Bygga en Robot med Perler pärlor

Styra din Robot med hjälp av mobiltelefon

Avlägsen kontrollerade robot med mobila video inspelningen

Styra din Robot med en Wii Nunchuck (och en Arduino)

Cool ROBOT: med magiska LED krafter

Bygga en Robot med MSP430 Launchpad
Hur man bygger en Raspberry Pi noll Humanoid Robot med Java

LINUSBot - rad efterföljare Robot - med PID control

Raspberr Pi Robot-en Hybrid Robot med Advance funktioner
Skapandet av en vandrande robot med polycaprolactone

Enkla självbalanserande Robot med Galileo Gen 2

Arduino-baserad rad efterföljare robot med hjälp av Pololu kvart-8RC line sensor
