ActoBitty raden efter Robot (1 / 8 steg)
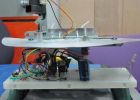
Steg 1: Montera ActoBitty











Du kan titta på en video tutorial
- Ta bort plast plattan från baksidan av mikro gearmotor höljet och sätt gearmotor. Ordna ledningarna så att den sätter inuti den medföljande indrag och tryck på plast plattan tillbaka på plats.
- Sätt in 4 skruvarna i de angivna hålen från insidan av kanalen. Med den angivna hex huvudet drivrutinen fäst växelmotorer till kanalen med deras ledningar vänd tillbaka mot den långa sidan av kanalen.
Sträcka av gummiringen läpp över kanten på de 2'' precision disk hjul så att hjulet är jämnt omfattas av ringen.
Feed fyra skruvar genom varje hjul och i de gängade hålen i det navets stoppskruv på andra sidan. Kontrollera att ställskruven ansikten från hjulet.
Skjut hjulen på motoreffekt axeln så att ställskruven ansikten i mot motorn. Använda medföljande hex huvudet föraren att dra åt ställskruvar. När de inställda skruvarna se till att sitter de centrerad på den platta delen av motorer utgående axel.
Fäst Arduino monteras på kanalen med de angivna hål. Dessa fästen kan ordnas för olika tillämpningar om så önskas.
Infoga caster kvarstad i rektangulära hål på caster fästet. Fäst den resulterande bit i botten av kanalen i angivna hålen. Orient stycke så att kvadratiska sensorn monteras ansikte från kanalen som anges.
Skjut det AA batteriet inuti kanalen. Fäst de acetal batteri fästen i de angivna hål att hålla batteriet på plats.

En enkel och billig DIY raden efter robot

[arduino motor shield] raden efter robot (FC-51)

Raden efter Robot

BOE Bot/Arduino raden efter robot

LINUS: Raden efter robot

Arduino kontrollerade raden efter Robot

Grundläggande raden efter Robot med Arduino

Linje efter robot med PID algoritm

Hur man gör ett objekt efter robot - stalkerbot

Världens enklaste linje efter Robot

Hur man gör en linje efter Robot
Väggen efter Robot med 555 Timer

Arduino ljus efter Robot

Raden efter Arduino Robot

Extremt enkel linje efter Robot med Arduino

Vägen efter Robot "Tweety BOT"

Arduino ljus efter Robot och undvika

Linje & väggen efter Robot
