Arduino R/C Lawnmower (painted)




















Detta instructable visar dig hur man gör din Arduino till en R/C gränssnitt som du kan använda för precis vad som helst som kräver fjärrkontroll. Jag kommer också att visa hur jag byggde en R/C gräsklippare med min Arduino, en billig R/C sändare och mottagare par och ett par El-rullstol motorer från Ebay. Jag har använt detta gränssnitt för att styra allt från grundläggande leds till bipolära stegmotorer, mini-robotar, livlös R/C bilar från sparsamhet butik, och även en 100lb gräsklippare (alla med lämplig motor styrenheter). Det är mycket flexibelt och enkelt att byta och mycket enkelt att ställa in.
Se en något annorlunda version av Lawnbot400 i min nya bok "Arduino Robotics" , samt en DIY Segway och flera andra robotar.
Kolla upp det i göra tidningen i April 2010 frågan (#22) eller här:
UPDATE 3-24-10
Nya skottkärra hink monterad på toppen med gångjärn så det kan dumpa innehållet.
UPDATE 3-10-10: NY KOD
Och ny video av Lawnbot400 flytta en massa smuts från min bil till blomman sängar över gården, även jag uppdaterat koden igen.
.
Jag la några nya kod till det projekt som är säkrare, inklusive en manuell kill-switch och en felsäker switch.
För att genomföra felsäkert, använde jag en annan Atmega168 (eller en Arduino), för att styra en normalt öppen 60amp lastrelä. Reläet kopplar från makten att motor-controller om inte få en "bra" signal från 2: a mikrokontroller. Denna signal uppdateras 2 gånger varje sekund och är antingen ON eller OFF. Om bot blir utanför intervallet, förlorar det makt till motorerna. Om jag vänder på kill-switch på sändaren, förlorar det makt till motorerna. Detta är också ett praktiskt sätt att inaktivera det distans om något skulle gå nära det som inte var tänkt att. Uppdaterade koden för båda mikrokontroller är på teckentabellen.
Förutom felsäkert förändrat jag hur koden läser PPM signalerna att göra det mer tillförlitliga. Dessutom insåg jag att jag bara var att köra bot med 80% hastighet med den gamla koden, så nu det är ganska lite snabbare och har mer makt (det kan bära mig över gården @ 155lb).
Kolla in denna nya video av mig rida Lawnbot400, min fru kör det över en massa grenar, då mig att göra några wheelies. Oroa dig inte, gräsklipparen var avstängd denna gång eftersom gräset inte behöver skära, vi hade bara kul.
Disclaimer:
FARA! Detta är en mycket farlig del av utrustningen om den inte hanteras på rätt sätt. Eftersom all elektronik har varit hembyggda och Arduino koden är nya, måste du vara mycket försiktig när du kör något tungt med denna kod. Jag har haft 1-2 gånger under provning - och innan du lägger till en sekundär failsafe - att huvudsakligen Arduino fastnat och jag tillfälligt förlorade kontrollen över gräsklipparen i några sekunder! Även om jag har lagt till flera filter om du vill ignorera oönskade signaler och jag har sällan några problem, en un-bemannade gräsklippare är fortfarande en potentiell dödsfälla och jag tar inget ansvar för något som sker till följd av din användning av denna kod eller denna tutorial. Detta är tänkt som en guide för människor som inte bara har möjlighet att bygga en sådan grej, men responsibiltity verkar det säkert också. Några förslag eller idéer om hur man gör detta till ett säkrare projekt är alltid gärna accepterat. Med detta sagt, är det också awesome.
Bakgrund:
De flesta R/C utrustning kommer packat för en specifik användning, vilket gör det lätt att använda men är mycket begränsad i vad du kan göra med den. Så använder Arduino som tolk mellan R/C-systemet och motor föraren, jag kan använda valfri motor controller som jag vill (beroende på storleken på den motor och makt krävs), omprogrammering Arduinoen för att förse signalerna som krävs.
Vad jag slutade med:
Efter framgångsrikt hacking några R/C bilar från sparsamhet butik, fick jag uttråkad kör dem runt uppfarten och jag hade svårt att övertyga min fru att det fanns någon nyttan i den återupplivade leksaksbil. Så jag bestämde att det var dags att göra min största knepig hemma, mycket enklare och faktiskt sätta min Arduino att fungera, och det är hur jag hamnade bygga en R/C gräsklippare.
När du utformar gräsklipparen, jag trodde det skulle vara häftigt att lära sig om elektroniken som gjorde det flytta, så jag konstruerade och byggde min egen motor speed controller (eller H-bridge) för att driva gräsklipparen. Jag tittade på varje H-bridge design jag kunde hitta innan man beslutar att gå med en Mosfet h-bron som använder både N-kanal och P-kanal Mosfets.
Jag byggde flera olika motor driver styrelser för detta projekt, två första var Radio Shack perf-styrelsen och den nästa 4 utformades med hjälp av EagleCad och etsade till en bit av koppar-klädda PCB, med metoden toner-överföring. Styrelsens senaste är den jag använder för att klippa gräsmattan eftersom den har förmågan att sval även när du kör för lång tid (30-40 min raka) på 10-20amps och 24vdc. FWIW, jag var tvungen att bränna upp en hel del Mosfets reda på detta. Om du vill se någon av mina andra motor styrsystem, gå till www.rediculouslygoodlooking.com och kolla in Mosfet sköld.
Här är vad jag köpte redan monterade:
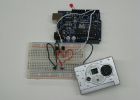
FM-R/C sändare och mottagare par från ebay = $40
Arduino = $30
Jag hade redan en begagnad push-gräsklippare = $60
Här är vad jag köpte och monterade in Lawnbot400 (som jag kallar det):
(2) El-rullstol motorer från ebay = 40 $ ea
(2) 12v Marina deep cycle batterier - Walmart - $60 ea nya (begagnade batterier kan fungera)
36" bitar av 2" vinkel-järn (2) och 1" square-slang (2) från Home Depot = $8 ea
36" bitar av 1" vinkel-järn (2) och 1" lägenheten stålsätter bommar för (2) från Home Depot = $5 ea
(mycket) av muttrar, bultar, brickor, låsbrickor 3/8" eller 1/2" med borrspets = $20
(2) hjul hjul från Harbor Freight Tools = $14 ea
(2) enheten hjul från Harbor Freight Tools = $8 ea
(36") 5/8" gängstång med flera 5/8 "muttrar och brickor från Home Depot = $8
(2) kedjehjul från Allelectronics = 5 $ ea
#25 rullen kedja och några universella länkar från Allelectronics = $10 för 3'
kedjehjul från elektronik Goldmine = $1,50 ea
(24) mosfets från Digikey = $1 ea
(det fanns en hel del små delar för att bygga H-bron, visas de senare)

Flaming Lawnmower Paint Job
ArduFlake: Förvandla din Arduino till den bästa gåvan av alla!

Bygga din Internet kontrollerad Video-Streaming Robot med Arduino och Raspberry Pi

Skapa egna membran matris knappsatsen (och ansluter den till Arduino)

Arduino Lilypad interaktiva Passion Sensing halsduk

Glas datorer baserade på Arduino Uno

Analoga VU-meter och klocka (Arduino Powered)

Arduino skrivbord Fan Controller

Bygga en kapacitiv rörelsesensor med kala Paint

Färg sensorer och Arduino seriell kommunikation för nybörjare

USB-Arduino morsekod nyckel
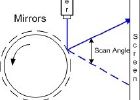
Alfanumeriska laser projektor med arduino

Paint puls: Digitala vatten marmorering

Shapeoko 2, Arduino UNO R3, grbl 9g, 8 bit lasergravyr diod foto

STEAMPUNK STEAM GAUGE, drivs av ARDUINO

2.4" TFT LCD Touch sköld Arduino

Arduino King Cobra spel
Hacking en Keychain digitalkamera för Arduino kontroll
