Autonoma Arduino bil med infraröd närhets-Sensor (3 / 7 steg)
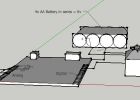
Steg 3: Rainbow kabel Setup (ansluter framåt, bakåt, höger och vänster)


För det första tråd för det andra flip (PCB) tillbaka över och hitta vilket stift styra den framåt, baksidan, vänster och höger genom att skapa en bit av rainbow med en 10 k resistor och sedan fästa tråd slutet på positivt i sedan testa genom att placera pin slutet i hålen på som lämnas av controller chip och räkna ut vilka kablar kontrollera vänster , höger, framåt och bakåt. sedan använda en löda sucker och unsolder och rensa ut hålen för stift den framåt, baksidan, vänster och höger. Vara noga med att inte använda för mycket värme för att undvika att skada PCB. Skapa en 4 rainbow installation, för det första: löda en 10K motstånd till en 4 olika rainbow trådar med sammanlagt fyra av dessa motstånd/wire uppställningar. Efter lödning slip en bit av värme krympa under slutet av rainbow tråd och krympa med en värme shrinker. Sedan soldat i fyra rainbow kabel installation till vänster, höger, framåt och vända och märkning vilket som är vilket. Slutligen måste du skapa en tråd som ska fungera som en jordledning som fäster till marken på PCB.

Autonoma Arduino bil

Billiga 4WD invända att undvika Robot med fyra IR närhet sensorer...
Kontrollera en Arduino ombord med en infraröd fjärrkontroll

RC bil till autonoma Arduino Robot

Kontroll Arduino RC bil med android telefon & 1Sheeld

Arduino kontrollerad bil med colission undvikande

Arduino RC bil med FPV Camera

Hur man gör en trådbunden Rc bil med en Arduino

Arduino RC bil med lång räckvidd och anpassade sändare.

Snabba Controlled RC bil med (4 CH Motor Driver styrenhet + Arduino + Bluetooth)

1. BM ARDUINO kontrollerad bil med HC-SR04

Radiostyrd bil med DPDT växlar

Styra Arduino bil via hoppa rörelse

Styra din Tyco RC bil med din Smartphone!

Bearbetning kontroller R/C bil med XBee moduler

Hur man styr alla R/C bil med ett flygplan sändare!

Hinder Avoider Robot använder Arduino Uno och IR-närhet Sensor

Foto resistor kontrollerade arduino pong med bearbetning