BaW-Bot del 3: Lägga till syn och Touch till Bot (7 / 8 steg)
Steg 7: Lägg till en känsla av beröring

Löda kontakter på växlarna
Det bästa sättet att ansluta växlarna till projektet är att löda tråd kopplingar på switch kontakterna. Du ser att jag använder SPDT (Single Pole, dubbel kasta) växlar, men för detta projekt kan du använda SPST (Single Pole, enda kasta) växlar också.
Skär hål i kroppen
Klipp små rektangulära hål så att morrhåren skjuta ut utanför sidan av roboten, men växlarna är gömd insida. Bolt dem på kroppen att hålla dem på plats.
Tråd växlarna upp
Som med alla växlar och knappar, detta inte ger en pålitlig signal när de inte stängs (dvs. att ta kontakt) – flyter de, slumpmässigt skicka hög eller låg signaler. Därför vi behöver antingen dra i spaken uppåt eller nedåt när det är öppet-i detta fall vill vi växeln vara lågt så vi dra den med en 10 k nedrullningsbara motstånd.
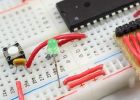
Om du använder en SPDT switch, har du 3 kontakter - varav 2 av dessa ska du använda? Ett enkelt test är att använda en multimeter (eller ens testa det på en skärbräda som kretsen i bilden ovan, att lägga till en LED) och se till att kretsen är komplett när växeln är stängd (aktiverat).
För varje switch:
- Ansluta en terminal till + ve järnväg
- Anslut den andra terminalen till bakbord. På samma rad i bakbord:
- ansluta en 10 k Ohm motstånd till GND (det nedrullningsbara motståndet)
- ansluta en bygel till relevanta stiftet på Arduino
Ansluta vänstra brytaren till Pin 2 och den högra Pin 3.
Som styrelsen blir komplexa nu (en bit av en ratsnest), jag har inkluderat en bild ovan för ledningar som behövs på en tom skärbräda för tydlighetens skull.
Början Microcontrollers del 8: Lägga till en knapp till mikrokontroller och göra det göra något

Gratis Power Point Malayalam Tutorials 2011 del 7 - lägga till en ClipArt-presentation

BaW-Bot del 1: Bygga en Arduino på ett bräde

BaW-Bot del 2: Bygga motor-controller & kropp

Lägga till en MCX typ antenn uttag i en Dell Inspiron 1501

Att lägga till nycklar till en Arduino Synth den hårda vägen-Blacklord: Organ Donor projekt del 2

Dekorativa Origami presentask: Del II, att lägga till Bling

Hur man lägga till egna låtar i Guitar Hero 3 (Wii) del 2

PSD till HTML5 konvertering: lägga till en HTML5 reglaget på en webbsida - del 2

Lägga till en ÖVERSKUGGARE i en worklight

Lägga till knappar i musen

Lägga till en ljudbok till en iPhone

Lägga till funktioner och ladda kameran "Disponibel"

Lägga till extern Mic-uttaget för Canon T1i / 500d

Lägga till Laptop påse i armén ryggsäck

LAMP projekt. Lägga till nytt liv med inre nattlampa och målade skugga

Att lägga till värmeisolering i tältet

Att lägga till internal(ish) Bluetooth till en bärbar dator
