Bearbetning kontroller R/C bil med XBee moduler (1 / 14 steg)
Steg 1: material


Trådlös (Bluetooth) kontroll Pop-Bot
Gör fast robotarm kanten till "Trådlös" med DIY Arduino + XBee och
Trådlösa Finger trumma,
XB-Buddy och XB-Buddy Basic kit
Och infört ett nytt projekt. (detta instructable - bearbetning kontroller R/C bil med trådlös XBee moduler)
Andra delen, var en djupgående workshop om att arbeta med XBee konfigurationens, den Processing seriell library, Arduino följetong och SoftwareSerial bibliotek.
I fallet om du vill bygga projektet, är nedan listan över maskinvara, programvara och delar.
Jag som också steg för steg-Detaljer (steg 11) att bygga PCB, och ändring av R/C bil (som inte visades på presentationen).
Hårdvara
Arduino eller Arduino Compatibles
XBee moduler
FTDI kabel eller motsvarande (dvs XB-kompis, Adafruit's FTDI vän, Sparkfun's Breakoutboard, Librelium's...)
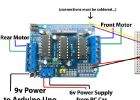
Motors förare ombord eller motsvarande
Billig R/C bil med min. 6VDC. batteri (exempel används var 1:16 skala Ford Mustang Shelby GT 2010, med 7.5VDC)
Drivrutin och programvara
FTDI - virtuella Comm portdrivrutiner
CoolTerm - gratis terminalprogram
Bearbetning IDE
Arduino IDE
Reservdelslista för DIY Motors Driver PCB och DIY Arduino
Om du är skrapa bygga DIY Arduino och DIY motorer Driver följande är listan delar, (se steg 11 för scheman och diagram)
(x1) ATMega328P med Arduino bootloader
(x1) 28-pin KI uttag (Digikey #3 M 5480-ND)
(x1) 16 Mhz Resonator
(x3) 0.1uF keramiska kondensator
(x2) 100uF/16V kondensatorer
(x1) 10uF/16 kondensatorn
(x1) 10 K resistortor
(x3) 1 K Resistor
(x1) 6-stifts rätt vinkel manliga header
(x1) 3 mm grön LED
(x1) 3 mm röd eller gul lysdiod
(x2) 2 pin kärl
(x1) L293D - Motor förare IC (eller SN745)
(x1) 16-pin KI uttag
0.1" grid PCB (ca 2-3/4" lång x 3-1/2" wide)
Hook-up tråd
Verktyg
Löda järn och lödning arbete stationen
Löda - kolofonium Core (Radio Shack #64-013)
Hookup Wire
Multimeter
Diagonal cutter
Tång
X-Acto kniv
Wire strippa
Löda Sucker
En annan Arduino fjärrkontroll bil kontrolleras av Android-telefon med Bluetooth-modul

Arduino Uno och Visuino: kontrollera Smart Car Robot med Joystick och L298N motorn förarens

Arduino trådlös programmering med XBee serie 1 eller 2

Kontrollera en Raspberry Pi RC bil med ett tangentbord

ESP8266-1 aktiverade RC vände Wifi bil med webbläsare kontrolleras riktning.

Arduino RC bil med FPV Camera

Kontroll Arduino RC bil med android telefon & 1Sheeld

IoT RC bil med Intel Edison (IntelIoT)

Remote Control bil med Arduino och Bluetooth

Hur man styr alla R/C bil med ett flygplan sändare!

No.02 ratt köra R/C bil med Arduino, webbkamera och net. USB etc.

Snabba Controlled RC bil med (4 CH Motor Driver styrenhet + Arduino + Bluetooth)

Arduino solar storma controller + effektreglering och data loggning online med Xbee WiFi

Autonoma Arduino bil med infraröd närhets-Sensor

Hur man gör en enkel bil med flaska

Göra en James Bond Spy bil (med vapen) och en spion skolan Halloween Display

Hur man använder XBee moduler som sändaren & mottagare - Arduino handledning

Arduino kontroller billigt RC bil sändare
