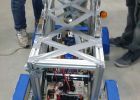
Bygga Builder roboten

Builder roboten är en komplett mobil robotik plattform och innehåller en arm med en gripare och en aktiv visionsystem. Dessa instruktioner beskriver stegen för att men tillsammans roboten från 3D ut filer. Instruktioner finns också på hur man monterar elektroniska systemen av roboten. Avsikten är att det bör vara möjligt att bygga en robot genom att följa stegen.
De viktigaste delarna av builder roboten är de sensoriska systemen, motoriska system, arm med gripper och datorn kör Ikaros (Balkenius, et al. 2010).
Sensoriska system Varje kamera är monterad på en servo som gör det möjligt att flytta uppåt eller nedåt. Roboten kan också mäta spänningen och den nuvarande som den använder. Detta kan användas för att uppskatta kraften används av roboten när som helst. Alla servon innehåller dessutom information om deras nuvarande position, deras temperatur och andra data.
Locomotion System Förflyttning används ett holonomic drivsystem med fyra Mecanum hjul monterade på servon. Detta gör att roboten att röra sig i någon riktning på marken.
Arm och gripdon Armen har fem grader av frihet och en gripare som gör det möjligt att plocka upp och manipulera objekt. Arm och gripdon styrs med sju servon. Varje servosystem ger feedback om det aktuella läget för alla fogar.
Ombord på datorer Builder roboten har en Mac Mini på styrelsen som är modifierad för att köra av batteriet. Det finns en Arduino Mega som används för att styra LED strip runt kroppen av roboten.
Ikaros Control System Ikaros ramen (www.ikaros-project.org) ger roboten med funktioner som realtidshantering sensorisk och motorisk kontroll, gängning, baserade monitor webbgränssnitt och ett urval av över 200 moduler för olika behandling och kontroll funktioner (Balkenius, et al. 2010). Det inre tillståndet av roboten (sensor värden, navigation, etc.) kan övervakas fjärransluta från en webbläsare över WiFi.
Bygga roboten omfattar huvudsakliga steg:
Hämta STL-filer för robotarna från Thingiverse: Thingiverse Builder roboten
Skriv ut alla delar med stöd. Vi använde en Makerbot Replicator 2 med standardinställningarna för PLA för roboten figur nedan, utom delar N som trycktes i NinjaFlex på en Replicator dubbla.
Ta bort materialet som stöd.
Installera Ikaros systemet på Mac Mini som beskrivs här: http://www.ikaros-project.org/installing/osx/
Mer information: Lunds universitet kognitionsvetenskap Robotics grupp
Referenser
Balkenius, C., Morén, J., Johansson, B och Johnsson, M. (2010). Ikaros: Byggnaden kognitiva modeller för robotar. Avancerad teknik informatik, 24 (1), 40-48

Lätt att bygga Lego roboten

DIY Vivus roboten

Hercules: Rörelse kontrollerade Android roboten

2 rullar RC Racer

Domaster & Tetrawing - Game Boy & Tetris spelet omvandla robotar!

Gör dig själv en TV-fjärrkontroll kontrollerade Arduino Robot!

LEGO chassi för Raspberry Pi Robot

AVR Chronograph från koncept till PCB

Instuctables väder Robot

LED Robot Sign

Halley: Ambassadör Robot 001
Scarlett Robotics första, F.I.R.S.T Robot :)

Hur man bygger en själv navigera roboten

Hur man bygger den perfekta roboten
BUILDING A BEAR ON A BUDGET!-dräkt och en FX marionett bygga

Bygga en segway med Raspberry Pi

TapeScape Audio roboten

Bygga din egen BARBOT
