Bygga en liten Robot: gör världen är minsta hjul Robot med en gripare. (3 / 9 steg)
Steg 3: En Robot magnetiska Motor


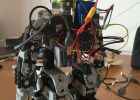
Bild 4 - flyttade jag fyrana ombord bilar att det normalt skulle ta för att göra detta genom att helt enkelt avbryta en magnet horisontellt på en två axeln gimbal. Två 1/8 "x 1/8"x1/16"magneter är epoxied till en vertikal axel tråd som är böjd för att bilda ett finger av griparen. De två magneterna är uppradade att fungera som en magnet och skapa en enda magnet motor. Detta är monterad i rutan minsta som har andra gripdon finger lödas till det.
Rutan gripdon monteras andra vågräta axel gimbal med 000 mässing skruv och mutter. Jag använde skruven så kan jag enkelt ta isär den för justeringar.
Ett yttre magnetfält är monterad på en CNC-maskin typ som kan glida magnetfält längs x- och y axeln och rotera den horisontellt och vertikalt. Det kunde ha gjorts med en electro magnet, men jag valde att använda en en kubiktum neodymium permanentmagnet eftersom det är det enklaste och snabbaste sättet att skapa ett stort magnetfält i en liten volym.
Bild 4c-så, med den norra delen av lilla magneten i roboten vänd mot den större yttre södra änden av magneten under den, robot magneten följer ganska nära förslagen till det externa magnetfältet.
För en kort video av roboten plockar upp en 8-pin IC, se här: http://www.youtube.com/watch?v=uFh9SrXJ1EA
Eller klicka på videon nedan.

Bygga en enkel Robot med hjälp av en Arduino och L293 (H-brygga)

Bygga en Robot med MSP430 Launchpad

Cool ROBOT: med magiska LED krafter

Bygga din Internet kontrollerad Video-Streaming Robot med Arduino och Raspberry Pi

Hur man bygger en Walking Robot - passiv Walker

Bygga STEMbot1 - en Robot som gör programmering roligt och lätt

Så vill du bygga en gigantisk robot.

Video Prop. Liten Robot "P.E.R.I"

Bygga en liten server

Bygga en Robot med Perler pärlor

Att bygga en liten fiskdamm i trädgården
Hur man bygger en Raspberry Pi noll Humanoid Robot med Java

DIY: Hur man bygger en WiFi Robot Spybot
Hur att montera Tamiya twin-motor växellåda - billigt liten robot framdrivning!

Hur till spår din Robot med OpenCV

Styra din Robot med hjälp av mobiltelefon

Styra din Robot med en Wii Nunchuck (och en Arduino)

Raspberr Pi Robot-en Hybrid Robot med Advance funktioner
