DIY navigeringsenhet för blinda personer som använder Arduino och Android smart phone (3 / 4 steg)
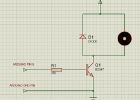
Steg 3: Programvara (Arduino kod)
#include < OneSheeld.h >
#define inputPin 11
#define outputPin 10
#define inputPin2 13
#define outputPin2 12
#define my_constant 20
unsigned int sensor_r_value;
unsigned int sensor_l_value;
unsigned int sensor_r_value_last;
unsigned int sensor_l_value_last;
int skillnad;
void setup() {
pinMode(inputPin,INPUT);
pinMode(outputPin,OUTPUT);
pinMode(inputPin2,INPUT);
pinMode(outputPin2,OUTPUT);
OneSheeld.begin();
}
void loop() {
read_sensors();
Delay(1500);
}
int measure_r() {
digitalWrite (outputPin, låg); Skicka låg puls för 2μs
delayMicroseconds(2);
digitalWrite (outputPin, hög); Skicka hög puls för 10μs
delayMicroseconds(10);
digitalWrite (outputPin, låg); tillbaka till låg puls
int avstånd = pulseIn (inputPin, hög); Läs echo värde
int distance1 = avstånd/29/2. i cm
returnera distance1;
}
int measure_l() {
digitalWrite (outputPin2, låg); Skicka låg puls för 2μs
delayMicroseconds(2);
digitalWrite (outputPin2, hög); Skicka hög puls för 10μs
delayMicroseconds(10);
digitalWrite (outputPin2, låg); tillbaka till låg puls
int avstånd = pulseIn (inputPin2, hög); Läs echo värde
int distance2 = avstånd/29/2. i cm
återvända distance2;
}
int read_sensors() {
sensor_r_value=measure_r();
sensor_l_value=measure_l();
om ((sensor_r_value<30) || (sensor_l_value<30)) {
TextToSpeech.say ("sluta nu och rotera);
}
annat {}
om (((sensor_r_value>30) & &(sensor_l_value>30)) & & ((sensor_r_value_last<30) || (sensor_l_value_last<30))) {
TextToSpeech.say ("gå fram");}
sensor_r_value_last = sensor_r_value;
sensor_l_value_last = sensor_l_value;
}

Dataintrång min RC bil använder Arduino och Android Smart Phone

IoT din Arduino använder bluetooth och Android smart phone (MQTT tjudra)

SONAR system använder Arduino och Android

Kör motorn med android använder arduino och bluetooth

Utveckla ett ATtiny firefly projekt använder Arduino och det är IDE

Hem automationssystem använder Arduino och SIM900 GSM modul
Snabba kontroll av dc-motor från laptop använder arduino och bearbetning

Mätning av avstånd (och mer) enhet använder Arduino och GPS

Blinkande lampor använder Arduino och LumiGeek

Experiment på skoj: Morsealfabetet Encrypter använder Arduino och Smartphone!
Ultrasonic Mapmaker använder Arduino och MatLab

TV KONTROLLERBAR fjärrdatorn MP3 spelare använder ARDUINO och bearbetning

Hemgjord robotarm med hjälp av standarddelar använder Arduino och en bearbetning GUI

Hemautomation använder Arduino och Bluetooth

Twinkle Twinkle använder Arduino och Summer; Den enklaste handledningen

Hur du använder Arduino och en RF 433 Long Range

KOMMUNIKATION mellan blinda och DÖVA använder ARDUINO och 1SHEELD

RC wifi bil Robot kamera använder Arduino och openWRT
