Himmelska Mechanica serie: växellåda design och konstruktion (2 / 6 steg)
Steg 2: Detaljerade beräkningar
Med den grundläggande strategin listat ut, var det dags att komma till detaljerna. Jag började ett stort kalkylblad för att beräkna de hastigheter och krafterna. Den är ansluten om du vill titta på det, fast det inte kanske är så spännande eller lätta att dechiffrera. Jag satte i verkliga orbit tiderna av alla planeter och etablerade kvoten mellan dem. Sedan satte jag i en siffra för hur snabb bana snabbaste planet, kvicksilver, skulle vara på skulpturen. 1 RPM för kvicksilver sätta Neptunus omloppsbana tid på 11,4 timmar. Det var lite lång, så vi slutade att göra det 4 gånger snabbare-kvicksilver skulle kretsa kring en gång var 15 sekund. Lite fort för något som går runt i en 6 fots diameter cirkel, men fortfarande rimligt, och då Neptunus skulle gå runt var 2,85 timme.
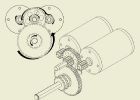
Eftersom vi var CNC plasma skärning växlarna och plasmaskärning producerar inte exakta kanter alls, hade tänder av växlarna vara ganska stor. På så sätt den vaghet från plasmaskärning skulle vara liten i förhållande till gear tooth. Vi åkte med redskap med en modul 0,5 tum. En bit av redskap teori: graddiametern avser diametern på en imaginära cirkel runt redskapet där det ändå samordnade mellan två växlar teoretiskt uppstår. Form av redskap tänder är faktiskt ganska komplicerat och tar några obskyra konstanter att beräkna, men varje tand slutar upp att vara någonstans halvvägs inne och halvvägs utanför denna diameter. Modul avser enheter av graddiametern per tand. Så om vi har ett kugghjul modul 0,5 i och 24 tänder, det betyder att har redskap som en diameter på 12". Kugghjul måste ha samma modul till mesh och diametrar måste även ökningar av modulen. Så fick våra redskap alla göras i steg om 0,5".
Det skulle också vara en mask enhet redskap reducer kommer ur den viktigaste motorn, en drev/kedja länk från redskap reducer till växellåda och ytterligare stadier av gearing från växellådan till varje planet. Så det var en ganska komplicerad och sammanhängande uppsättning av saker, och jag var tvungen att justera förhållandet mellan alla komponenter för att uppnå den slutliga önskad hastigheten på varje planet. Det är här kalkylblad är din vän! Jag satt upp en serie av formler för VARVTALET på varje del, varje formel beroende på resultatet av den innan det i drivlinan. Även om slutresultatet är komplicerad, är det bara en samling av enkla relationer. Jag spelade med storleken på växlarna och kedjehjul i kalkylbladet tills hastigheterna som omloppsbana var nära vad vi ville.
Vid denna punkt, hade jag också att räkna ut hur man ska hantera vridmomentet från vinden. Pjäsen är konstruerad för att tåla en 85 MPH vind, och som översätts till en hel massa vridmoment från de stora planeterna som finns på långa armar. För att undvika att utforma hela systemet att hantera alla vridmoment, beslöt jag att i stället låta systemet att glida på en viss vridmoment, som skulle låta armarna vindflöjel från vinden och minska styrkan på drivsystem. Löneglidning skulle komma från bromsarna används för varvtalsreglering, som skulle sättas upp att greppa bara tillräckligt för normal drift. Jag sedan kunde använda en reducerad vridmoment belastning på systemet, och gjorde några beräkningar på viktiga komponenter för att se till att de skulle hålla design vridmomentet.

LED-ljus fixturen Design och konstruktion
Förståelse Motor och växellåda Design

Design och prototyper av Skelequill Start till slut

Designa och bygga vackra RC flygplan

Läder draken Mask del I - Design och skärning

Hur till: Design och rita i 3D!

Designa och skriva ut dina egna fusktatueringar

3D-Design och göra en egen konstruktion som

Quadcopter hacka! [Designa och skriva ut din Propeller vakt]

Intro - hur att designa och bygga en bambu last cykel (Box cykel - Bakfiets).
3D Design och utskrift med hjälp av fri programvara

Designa och göra dina egna keramiska muggar

Designa och skriva ut en skräddarsydd laddning Station

Interaktiv Design och kodgenerering för anpassade Android menyer för Arduino--nej Android programmering krävs
Från idé till verklighet: 3D Design och utskrift för den gemensamma Man.

Arbetsflöde: Grunderna i 3D-Design och 3D-utskrifter

Design och skapa en klänning

PCB-design och isolering fräsning endast med fri programvara
