Hovercraft by D.O.E (1 / 9 steg)
Steg 1: Konceptet Diagram & design


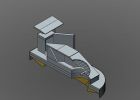
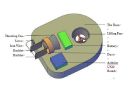
Diagrammet ovan visar vår design av vår svävare.
Det huvudsakliga kontrollerande systemet av vår svävare är en arduino styrelsen Arduino Mega 2560, som kan ta emot och sända ut signaler i programmet som vi skriver för det. En sex-kanals fjärrkontroll är vår controller för föraren. Eftersom sex kanal fjärrkontrollen kan skicka kontinuerlig digitala signaler, kan föraren styra svävare perfekt med kontinuerlig drift.
Vi använder en pensel motor för att ge lyft fläkten för vår svävare. När motorn fungerar, luftflödet först blåsa pratkvarn genom hålen runt basen under svävare. Efter pratkvarn är fylld, luftflöde kommer ur svävare genom centrum hålad på den under basen. När luftflödet tar slut, det slog i marken och ger en impuls straightly till lägenheten under bas i stället för den skadade pratkvarn, vilket gör svävare mycket stabil. När luftflödet går säcken gas, gör flödet mellan pratkvarn och marken friktionen ganska liten så att svävare kan köras i en mycket hög hastighet. Även löser denna design problemet med egen spinning eftersom våra pratkvarn är stängd.
Ett servo med roder är anslutna till och en borstlös motor ger framdrivning och möjligheten att ändra riktning. Motorn är fast på övre basen av svävare. Roder är fasta precis bakom den. När roder att ändra sin ståndpunkt, luftflödet hit roder och ger dem en impuls som orsakar svävare i samband med rodret att ändra dess riktning. Denna enhet är ganska känslig för att ändra riktning och lätt att kontrollera grader vi vända på grund av kontrollera över rodret.
Eftersom vår fjärrkontroll kan ge tre kanaler för kontinuerlig digitala signaler, kan vi styra servo, lyft fläkten och framdrivning motorn på samma gång. Vi kan minska hastigheten på lyft fläkten när vi går på släta marken och öka det när du kör på grov yta. På detta sätt kan vi alla möjliga utmaningar i turneringen.

Easy Hovercraft

DIY Hovercraft

Rc hovercraft
HOVERCRAFT

Tumbler-like Hovercraft
Hovercraft tutorial

Arduino RC Hovercraft

PS3 Controlled Arduino Based Hovercraft (Bluetooth) by Micrazysoft

Autonoma, trådlöst kontrollerade svävare

RC båt för $10

Radio styrd kartong svävare

Sommaren 2014 svävare konkurrens Shane Group19
