Hovercraft by D.O.E (3 / 9 steg)
Steg 3: Design kretsen

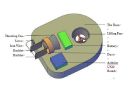
Diagrammet ovan visar vår krets.
Vi använder ett 9 V batteri till strömförsörjning för Arduino styrelsen servo och mottagare ansluten till den. (Arduino styrelsen kan justera spänningen till 5 V automatiskt.) Vi använda 11,1 V Li-Po för att leverera ström för två motorer.
Borstmotorns strömbrytare som fungerar som lyft fläkten och borstlös motor som ger framdrivning är båda anslutna till en elektrisk varvtalsregulator. De elektriska Hastighetsregulatorer är anslutna till PMW stiften på Arduino styrelsen. När vi ger servo en digital signal mellan 0 och 180, kan det ändra dess placerar för 180 grader. När vi ger motorerna en digital signal mellan 1000 och 2000, kan det fungera mellan dess lägsta och högsta makten. Var uppmärksam, ökande av hastigheten kanske inte linjär, som bör tas hänsyn vid programmering.
Mottagaren, som tar emot signaler från tre kanaler på fjärrkontrollen, är ansluten till tre stiften på Arduino styrelsen. Var uppmärksam, eftersom funktionen för att överföra signaler är en avbryta en, vi ska ansluta mottagaren till int stiften på Arduino styrelsen. För Arduino Mega 2560 väljer vi Pin 2 och Pin 3 Pin 22 som stiften för denna del. (Exakt information för detta kan anges på den officiella webbplatsen av Arduino.) När registeransvarige flyttar navigeringsknappen på fjärrkontrollen, kan vi få en digital signal mellan 1000 och 2000 från mottagaren.
Spänningen i batteriet förpackade bör vara högre än 11 V att göra de elektroniska komponenterna fungerar korrekt. För 11.1V batteri, säkerhet spänningen är cirka 12,6 V och du ska inte ladda det alltför ofta, vilket kan orsaka irreparabla skador på batteriets.

Easy Hovercraft

DIY Hovercraft

Rc hovercraft
HOVERCRAFT

Tumbler-like Hovercraft
Hovercraft tutorial

Arduino RC Hovercraft

PS3 Controlled Arduino Based Hovercraft (Bluetooth) by Micrazysoft

Autonoma, trådlöst kontrollerade svävare

RC båt för $10

Radio styrd kartong svävare

Sommaren 2014 svävare konkurrens Shane Group19
