Införa Wixel USB trådlös modul (6 / 10 steg)
Steg 6: Koppla in saker och göra något verkligt - USB-seriell del 2





Detta steg visar hur du gör något verkligt, upptäcka rörelse med din PC och reagera på den.
De flesta PIR-sensorer har en digital ut pin som signalerar när rörelse detekteras.
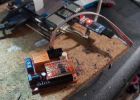
DFRobot sensorn tar 3-5V till vänster stift, Gnd till rätt PIN-kod och digital out från mellersta PIN-koden. Till skillnad från info på deras hemsida är produktionen hög när rörelse detekteras. Jag märkte en lödd bygel med H & L (längst ner till vänster i bild två ), så jag misstänker att detta kan vara skräddarsydda om behövs.
Ta bakbord från föregående steg, ta bort växeln längst bort från USB-kontakten. Nästa ansluter vi PIR-sensorn.
När jag beställde min DFRobot sensor som det såg ut som en bild , vad fick levererat var som visas i bilder två & tre , de lagt till en liten styrelse med JST kontakt och levererade en JST till kvinnliga 0.1" stift.
Om din sensor som bilden en , Anslut den till bakbord på sidan med färre kablar, uppradade där växeln var (efter att du gör följande ledningar eller det blir i vägen).
Sedan använda bygeln kabeln för att ansluta den + ive stift till den + ive buss - ive pin till - ive (Gnd) bussen och utgångsstiftet till den rad som var ansluten till pin P1_3 (/ CD), det vill säga rad 18. Som jag inte har en så här kan inte jag visa dig en bild, men se bild fyra där jag har märkt raderna du använder.
Om du har sensorn med JST ledningar, måste du dra ut tre huvud stift och infoga dem i 0.1" pin uttag, se bild tre och läsa taggarna; du behöver definitivt Tänger för detta. Kan du ansluta den till bakbord. Detta är ett hack som jag inte har den lämplig kabel eller -adapter, gör inte detta för något viktigt.
Lyckligtvis de line-up med aktuella ledningarna i styrelsen, ansluta den där växeln var, med svart tråd längst bort från USB-uttaget, tråd en bygel till den mellersta raden till den + ive buss, se bild fyra .
OK, nu kör SerialPortGeneralIO.exe , bör du se /DCD ändras när rörelse detekteras, du kan kryssa för rutan beep och du har en grundläggande rörelse larm. Kom ihåg /DCD är inverterad, så markerar du rutan Invertera - så att det Piper endast när rörelse upptäcks. Se bild fem .
Naturligtvis du kan göra andra saker som att skicka ett e-varning, spelar ljudet av kanoner som läses in och någon wispering "deras här, du redo, jag tar den första killen ";)
Nog med enkla grejer.
Nästa - Anslut saker och göra något riktigt - med en Arduino.

En ram för att göra prisvärda & eleganta modulära styrsystem (USB till MIDI, gömde sig, eller seriella)

USB-ZRLC-PINCETT

Trådlös Wii Nunchuk-till-Mouse USB-minne för PC, Mac, och Tablet PC-spel

2$ USB Pic programmerare & seriell kabel

Min nya bekvämt liten USB-minne
Utveckla för ESP8266 på Raspberry Pi

Arduino RC bil med FPV Camera

Hur man gör den enklaste bakbord Arduino Uno... NÅGONSIN! -Breduino! (& Hur ladda upp skisser rakt till det!) With Additional Hardware Options - UPDATED - JULY 2013

Stapelbar LED kuber!

Del 2 openHAB, MQTT och lätt ESP - bygga din egen DIY nod

Kontrollera din TV med din telefon

DIY Bluetooth högtalare

DIY bärbara Boombox (från början!)

Batteri-fri 5 volt projektet power

Komma igång med ESP8266 ESP-12
GPS båt hastighetsmätare

Komma igång med ESP8266 på kommandon, NodeMCU eller Arduino (ESP-12naE)

Gör en ARDUINO på egen hand...!!!