Införa Wixel USB trådlös modul (8 / 10 steg)
Steg 8: Anslut saker och göra något riktigt trådlöst!





Med personer läsa trådlös seriell App v1.2 , se bild en , Observera parametrarna till höger. Vi är bara intresserade av de första två parametrarna och den sista.
Den andra parametern är överföringshastigheten, ändra det till 57600.
Bläddra nedåt till den sista parametern, radio_channel. Som doco säger "kanalen nummer är från 0 till 255 och bestämmer vilka ofta att sända på. Wixels måste vara på samma kanal att kommunicera med varandra. För att undvika störningar, Wixels som inte är tänkt för att prata med varandra bör vara minst 2 kanaler från varandra. "
Vi kommer att lämna kanalen som standard, men när du får flera Wixels behöver du kanske hantera kanaler för att förebygga konflikter. Båda Wixels kommer att vara på samma kanal, dubbelriktad I/O dem emellan.
Denna app låter Wixel att trådlöst eller trådbundet följetong som beskrivs på http://www.pololu.com/docs/0J46/9.b . Parametern seriell läge bestämmer läget. Zero är ett automatiskt läge som kraftkälla används för att bestämma läget. Detta passar vad vi kommer att göra.
Vi kommer att använda en Wixel ansluten till datorn trådlöst kommunicera till den andra Wixel. Den "remote" Wixel blir på batteri. Det noll automatiskt läget innebär USB powered Wixel ska använda radion, och VIN drivs "fjärrkontrollen" kommer att överbrygga radion och UART (dvs TTL seriell).
Förutom den trådlösa seriella signalen i säkerhetsteknik som anges /DTR /RTD/DSR /CD signaler finns även trådlöst. Lämna Standardtilldelning av stift, men personer parametrarna kan du tilldela dessa till andra stift om du behöver.
Så efter ändra baudfrekvens, skriva app till Wixel på en skärbräda.
Nästa unplug Wixel, Anslut USB-kabeln till den andra Wixel.
Med personer ladda trådlös seriell App v1.2 , inställd 57600 BAUD rate parametern och skriva till Wixel. Windows installerar drivrutiner och fördela en COM-port, Obs COM-porten i personer.
Lämna denna Wixel ansluten till datorn, montera denna Wixel på den andra skärbräda för stabilitet.
Nu om batteriet. Tekniskt Wixel kan använda strömförsörjning från 2,7-6,5 volt, men det finns andra överväganden. Om det är under 3.5V den 3.3V utgång kommer att understiga 3.3V, på grund av spänningsfall på regulatorn. VALT kommer att vara något mindre än VIN, på grund av en diod; på USB-ström (5V) mätt jag VALT som 4.33V.
Om du är nöjd med 3.3V @ 150ma för kretsar, helt enkelt leverera 3.5 till 6.5V till VIN. Men om du vill använda 5V också, du ger 5V reglerade ström (så VALT är stabil i din andra kretsar).
Vi kommer att hålla sig till 3.3V för filipbanfors och använder 4 AA batterier; rechargables erbjuder ~4.8V och normal AAs ~ 6V. Min fyra fulladdat NiMh celler lagt ut 5.54V.
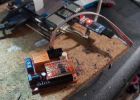
Sätt dina batterier och Anslut svart till - ive (Gnd) bussen, Anslut rött till VIN (stift 2 till vänster, dvs abcde kolumner), jag antar du har växlat batterilådan. Om kabeln leder är lite lös i styrelsen, har jag lite knep, Använd en naken header stift och jam i samma hål som tråd, se bild två .
Bilder tre & fyra visar min anslutning, med mini-växeln, med de extra hål under antennen. Svart sladd till mitten stift, och en yttre pin är byglad till bus - ive (Gnd).
Kör SerialPortGeneralIO.exe , ställa in COM-porten , kolla rutorna Blink och rutorna DSR pip & Invertera.
Slå på batterierna på den "remote" skärbräda och du bör se blinkande lysdioder, se bild fem , och om du trycker på knappen PC bör pip.
Två sätt trådlös kommunikation! Ganska enkel Hej!
Nu ta din remote styrelsen & batteri och gå undrar runt huset & utanför, slutar blinka signalen går förlorad.
Jag kom till den andra änden av ett medium trähus, ~ 12m / 36ft, och hade en signal mycket av tiden, vissa ställen med massor av väggarna var döda punkter. Utanför få jag bara signal med siktlinje till rummet med den andra Wixel.
Detta kommer att vara mer än tillräckligt för min robot, som jag kommer att vara i linje om synen.
Nästa - jag Vira.

En ram för att göra prisvärda & eleganta modulära styrsystem (USB till MIDI, gömde sig, eller seriella)

USB-ZRLC-PINCETT

Trådlös Wii Nunchuk-till-Mouse USB-minne för PC, Mac, och Tablet PC-spel

2$ USB Pic programmerare & seriell kabel

Min nya bekvämt liten USB-minne
Utveckla för ESP8266 på Raspberry Pi

Arduino RC bil med FPV Camera

Hur man gör den enklaste bakbord Arduino Uno... NÅGONSIN! -Breduino! (& Hur ladda upp skisser rakt till det!) With Additional Hardware Options - UPDATED - JULY 2013

Stapelbar LED kuber!

Del 2 openHAB, MQTT och lätt ESP - bygga din egen DIY nod

Kontrollera din TV med din telefon

DIY Bluetooth högtalare

DIY bärbara Boombox (från början!)

Batteri-fri 5 volt projektet power

Komma igång med ESP8266 ESP-12
GPS båt hastighetsmätare

Komma igång med ESP8266 på kommandon, NodeMCU eller Arduino (ESP-12naE)

Gör en ARDUINO på egen hand...!!!