Intellekten Edison: Radar (4 / 5 steg)
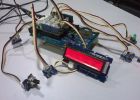
Steg 4: Infoga det på Edison och börja kodning!




Den kod grundläggande är ganska enkelt, göra bara servo rotera i steg från höger till vänster och tillbaka och sedan göra ultraljud sensorn att leta upp avståndet till den aktuella positionen.
All information är tryckt till seriell, häxa vi kommer att använda senare att dra en beskrivare av insamlade data.
Koden går så här.
Definiera komponenter och konfigurera globala variabler.
#define ECHOPIN 6
#define TRIGPIN 5
#include
Servo myservo;
int pos = 0;
Sedan kan få setup rätt.
void setup() {
Serial.BEGIN(115200);
myservo.attach(9);
pinMode (ECHOPIN, indata);
pinMode (TRIGPIN, OUTPUT);
}
Och sedan huvudprogrammet. Om du vill justera vinkeln på servo bara justera pos = 10 och pos = 170.
Detta är den servo rörelsen i servo position. Pos += 3 innebär att varje steg är 3 steg för servomotor.
OID loop() {
myservo.write(10);
Delay(1000);
för (pos = 10; pos < = 170; pos + = 3)
{
myservo.write(POS);
Print(Distance(), pos);
Delay(15);
}
Delay(1000);
för (pos = 170; pos > = 10; pos-= 3)
{
myservo.write(POS);
Print(Distance(), pos);
Delay(15);
}}
Vi gör sedan några subrutiner att köra i slingan. Detta kommer bara göra huvudprogrammet ser mycket mer renare.
Annullera utskrift (int R, int T)
{
Serial.Print(R); Serial.Print (",");
Serial.Print(T); Serial.println(".");
Delay(100);
}
float avstånd () {
digitalWrite (TRIGPIN, låg);
delayMicroseconds(2);
digitalWrite (TRIGPIN, hög);
delayMicroseconds(10);
digitalWrite (TRIGPIN, låg);
Beräkning av färdavstånd
flyta avstånd = pulseIn (ECHOPIN, hög);
avståndet = avstånd/58,2;
Return(Distance);
}

Intellekten Edison levande temperatur uppvisning

Intellekten Edison Fat Bike Tire Analyzer

Intellekten Edison buller larm (Intel IoT)

Intellekten Edison/Arduino temperatur uppvisning med momentan bakgrundsbelysning

Intellekten Edison - Initial Setup

Intellekten Edison morsekod tränare

Intellekten Edison enkelt avstånd Sensor med Grove LED Bar indikator och Summer
Intellekten Edison: Hetta mätare, TMP36

Intellekten Edison Metronome

Intellekten Edison driftigt bluetooth audio.

Intellekten Edison Universal Translator

Intellekten Edison talar till Linkit en

Intellekten Edison - Robot

Intellekten Edison kör Python skript

Intellekten Edison Telepresence robot

Intellekten Edison/Seeed/Nexus 3WD OmniRover

Intellekten Edison AirQualitySensor

Intellekten Edison Gas sensorsystem att upptäcka Biogas / gasol läckage