IR kontrollerade 3D tryckta Rover (Arduino) (3 / 6 steg)
Steg 3: Control System



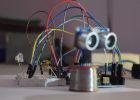
Styrsystemet börjar med 1300mAh Litium polymer batteri. Detta batteri är en lite over-Kill för detta projekt, men jag köpte den med intentionerna i alternativa användningsområden. Power matas sedan in i en ställbar spänningsregulator som kliver kraften ner till ca 5.08v. Spänningen var ursprungligen inställd på runt 6.71v för att uppnå 5v ut från arduino. Men eftersom kontinuerlig servon fick främsta nätaggregatet från 6.71v källan och inte 5v källan, det fick dem att inte fungera korrekt. Avgå spänningen, löst kommer från spänningsregulator, till 5.08v detta problem. Så, efter spänningsregulator, kraften skickas till en PCB ombord och distribueras till arduino och alla andra komponenter. IR-mottagaren, både lysdioder och ultrasonic sensor monteras i de bostäder som ligger på toppen av rover. Du kommer att behöva löda ett par rader av post till PCB-kortet för att distribuera all makt och grunden för de olika komponenterna i rover.

Gest kontrollerade robot använder Arduino

DriveMyPhone - Smartphone kontrollerade 3D tryckta fordon
Gest-kontrollerade Pac Man med Arduino & Grove gest modul

3D tryckt fyrfotadjur Arduino Robot

Bluetooth kontrollerad fan regulator med Arduino

Hur man gör en avlägsen kontrollerade Robotic Hand med Arduino

Mobil kontrollerade robotic bilen med arduino och DTMF

Mind-kontrollerade trafikljus använder Arduino och MindFlex

Raspberry pi wifi kontrollerade rock crawler med arduino

Arduino modulär Robot

Med 433 MHz fjärrstyrda strömbrytare på Arduino
Gest kontrollerade gaming

Arduino Uno katt xylofon

Arduino + tangentbord + servo kontroll

Synkronisera robotarm handledning

Återvinna julkort som digitala inspelare modul

ESP8266 WiFi touch skärmen termostat

Gyro stabiliserad två Wheeler (V5) - styrbara
