Synkronisera robotarm handledning


Robotarm teknik är en av de mest vilt använda teknologin i robotic automationsindustrin. Dess noggrannhet, effektivitet och stabilitet gör det ett enastående verktyg för fina, repetitiva och tunga operationer. Avlägsen kontrollerade robotarmar kan också köras under hög risk eller extrema förhållanden. De flesta av robotarmar bygger dock tungt på förinställda control program, som gör sin funktionalitet och anpassningsförmåga till stor del begränsat. Dess mekanism signalering kan också trivialt och intuitiv för lätta användare. För att hitta en enkel lösning för icke-professionella användare att manipulera robotarmar, har begreppet med en synkronisering system för att styra robotarmar lagts fram under de senaste decennierna. Dock på grund av komplexiteten i sin algoritm, de flesta av dessa vapen kan endast ses i fiction filmer eller TV visar.
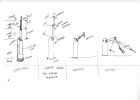
I denna tutorial, vi visar dig hur till
installera potentiometrar på en suspension arm, fånga data och mappa dem till en servo kontrollerad robotarm genom en Arduino chip.

Arduino robotarm

Läpp synkronisera i flash

Robotarm för autonoma Tank

Gör fast robotarm kanten till "Trådlös" med DIY Arduino + XBee

AVR Assembler handledning 6

Använda BitTorrent Sync för att synkronisera dina filer

Proof-of-concept robotarm och kontroller (Lego nxt)

Bygga en robotarm för Science Olympiad

Bygga din egen Butler Robot! -Handledning, foton och Video
Skriva ut en robotarm

Robotarm med transportband, kunna monteringsarbete stycken pågår

Autonoma Tank med robotarm (Arduino, Bluetooth)

6 Dof robotarm som kontrolleras av 1Sheeled

Rörlig robotarm med PHIRO + Arduino

3D tryckt robotarm

Batch + CMD liten handledning

Krock mellan klaner GOLEM illustration handledning

65xx teknik-församlingen språk programmering med W65C02SXB-handledning 1
