Synkronisera robotarm handledning (16 / 17 steg)
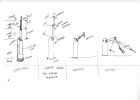
Steg 16: ledningar


Vi tillämpat en spänningsavdelare krets och mäta spänningen över resistorn. Som potentiometern och resistorn kopplas i serie, känna vi spänningen över potentiometern genom att mäta spänningen över resistorn.
Varje potentiometer rörelseområde är mindre än 180 graders,
Vi kan sätta dess operativa motstånd mot allt från 10000-40000 ohm genom att justera dess inledande orientering. För att ytterligare förbättra noggrannheten och gör spänning-motstånd förhållandet nära linjär, vi kan använda följande metod för att hitta perfekt motståndet av motståndet.
R: motståndet av motståndet
r: motståndet av potentiometern
V: inspänning
V: spänningen över resistorn
Enligt spänningsavdelare banan, v=V*(r/(r+R))
Använda den krökning k v-r tomten är att hitta det bästa värdet av R (bild 2)
Här x är r, Y är V*(r/(r+R)).
Som det lägsta värdet för k motsvarar punkten med bäst linjära egenskapen, kan vi ta derivatan av k med avseende på R och hitta värdet på R som leder k lika med 0.
Observera att på grund av andra komponenter begränsade noggrannhet, motståndet som vi använder behöva inte ha exakta motståndet som vad vi har räknat från ovan. I vårt fall, för att få ett rättvist resultat, kan vi helt enkelt valde 15000 ohm motstånd för alla dessa leder.

Arduino robotarm

Läpp synkronisera i flash

Robotarm för autonoma Tank

Gör fast robotarm kanten till "Trådlös" med DIY Arduino + XBee

AVR Assembler handledning 6

Använda BitTorrent Sync för att synkronisera dina filer

Proof-of-concept robotarm och kontroller (Lego nxt)

Bygga en robotarm för Science Olympiad

Bygga din egen Butler Robot! -Handledning, foton och Video
Skriva ut en robotarm

Robotarm med transportband, kunna monteringsarbete stycken pågår

Autonoma Tank med robotarm (Arduino, Bluetooth)

6 Dof robotarm som kontrolleras av 1Sheeled

Rörlig robotarm med PHIRO + Arduino

3D tryckt robotarm

Batch + CMD liten handledning

Krock mellan klaner GOLEM illustration handledning

65xx teknik-församlingen språk programmering med W65C02SXB-handledning 1
