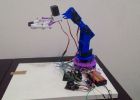
Robotarm med transportband, kunna monteringsarbete stycken pågår


Detta är ett projekt där jag utformat och byggt en arbetsplats till en sex grad av frihet robotarm. Det är ett vanligt exempel från en produktionslinje som arbetsstycket reser på en bandtransportör eller palett till arbete stationen, där det stannar i en fast position, och robotarmen tar över avslutningen av förfarandet därifrån. Mitt främsta mål var att göra experiment, om robotarmen är tillräckligt exakt för att församlingens arbete bitar under de flyttar på ett transportband. Denna "on-the-go" församling (eller andra industriella uppgifter) används inte allmänt i branschen ännu, men de kommer att vara i framtiden.
Hur fungerar det?
Det finns en inkrementell pulsgivare på undersidan av motorn av transportband, som ger information till huvudprocessorn enheten av robotarm, för att kunna beräkna den faktiska hastigheten och flyttning av transportband.
På sidan av transportband finns det flera induktiva beröringsfria, som kan upptäcka paletten aluminium, när det passerar genom dem. Med hjälp av denna information, robotarm griparen kan följa paletten med samma hastighet, och det är kunna göra allt arbete som församling (eller vilken uppgift vi gav till det). Hastigheten på transportbandet är justerbar med två frekvensomriktare. Paletten kan stoppas i flera punkter med pneumatiska propp, och det återgår till sin ursprungliga position med hjälp av en pneumatisk väg.
Jag inte byggt alla delar av transportbandet, som bas jag använde delar av en gammal demonteras transportband (som användes i en Nokia fabrik för skaffa högtalare i t.ex.. 3310 mobiltelefoner :)). Kodaren, paletten och andra delar jag gjort manuellt, och naturligtvis, programmering, vilket var det svåraste arbetet! :)
Du kan se här arbete stationen, under en enkel montering uppgiften med endast 30% av den maximala hastigheten.
http://www.youtube.com/watch?v=W-lj-y5idF0
Jag är nu i ämnet för 3D utskrift och planerar att köpa en glödtråd feeder, hot-end och munstycke (delar av en 3D plast skrivare) och lägga den på robot gripdon huvudet. På detta sätt jag kan prova att skriva ut stora objekt (i maximal storlek ~ 1, 2 m * 0, 8 m). Maj skulle det vara bra att utvidga detta huvud med en dator fläkt, så förmodligen plast glödtråden kommer att kyla ner mycket snabbt, och bara en mycket få belägg kommer att behövas under tryckta objektet.
Detta kommer naturligtvis att vara endast ett experiment också, eftersom jag kan använda mitt universitet robot endast i en begränsad tid :)

Styra en robotarm med Microsoft Kinect!

Robotarm med servomotorer

Hemgjord robotarm med hjälp av standarddelar använder Arduino och en bearbetning GUI

Bygga en 5-axlig robotarm med Arduino och DynamixShield

ROBOTARM med USB PC-gränssnitt (plus hur man monterar)

Interaktiva sökvägen följande robotarm med pfodApp

Bygga robotarm med Makeblock delar

Min nionde projekt: Robotarm med Joystick sköld

Robotarm med bipolär stepper

Kontroll robotarm med handskar, Android-telefon och Arduino

Rörlig robotarm med PHIRO + Arduino
Bygga robotarm med 3DP +Arduino(用3DP+Arduino製作機械手臂)

BT mobila Ctrl stammen robotarm med String

Styra en OWI robotarm med Arduino

Styra en robotarm med Arduino, 1Sheeld och en Android Smart Phone

Kontrollera ArmLinkLibrary-master robotarm med Arm länk programvara

Kontroll robotarm med handskar, Android-telefon och Intel Galileo (uppdaterad)

Robotarm med kaffe gripdon
