Kontinuerlig Servo Mod (3 / 6 steg)
Steg 3: Kalibrera servo.



Bredvid motorn bör du hitta en potentiometer. Detta ger den elektronik feedbacken på placeringen av växlarna. Förutsatt att potentiometern berättar servo som det är satt till 180, då motorn inte kommer att flytta om du sätta den till 180 igen. Men det kommer sakta börjar rotera om du sätta den till 178 och det börjar rotera mycket snabbt om du sätta den till ett mycket lågt värde som 12.
(Om du ville använda servo som ett mätinstrument du kunde bifoga ytterligare leder till potentiometern för att alltid ha information om servon ståndpunkt. Jag behöver en kontinuerlig servo, så detta är irrelevant för vad jag gör.)
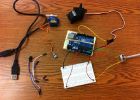
För att kalibrera servo jag koppla den till en Arduino (röd till + 5v, svart till GND, gul/vit till någon PWM aktiverat stift, valde jag 9 - andra bilden) och ange att det ska gå till 90 så här:
#include < Servo.h >
Servo myservo; skapa objekt för att styra en servo servo
void setup() {
myservo.attach(9); tillmäter objektet servo servo på pin 9
}
void loop() {
myservo.write(90); berätta servo gå till 90
}
Om inte potentiometern är redan exakt på 90 position, kommer det börja snurra. Om du vrider potentiometern hittar du att motorn snurrar långsammare ju närmare du kommer till 90 position. Motorn kommer att vända riktning om du passerar 90 position. Justera potentiometern tills motorn stannar. Slutligen det böja sig framåt, så det är ur vägen för återmontering (sista bilden).

Krets specialister 180 graders Servo Tower ändra till kontinuerlig Servo Tower.

Kontinuerlig Rotation Servo Mod - justerbar metod

Arduino & Visual Basic 6.0 (kontinuerlig Servo Motor)
Arduino + Servo + Potentiometer

4 servo drive CellBot som kan fjärrstyras.

Konvertera mikro-servon för kontinuerlig Rotation

Två hjul Robot Design & simulera

Fido Feeder

Automatic Drink Mixer

Automatisk Arduino Powered sällskapsdjur mataren

Bubble Machine

Automatisk Halloween godis Dispenser

Robbie - din egen anpassningsbara Humanoid assistent!

Actobotics pan & tilt övervakningskamera med Arduino

SoccerBot med IR-fjärrkontroll

Tornerspel Robot (ledningar Tutorial)

Wallbots: Autonoma magnetiska robotar att korsa vertikala ytor

Bygga en stor kran spel
