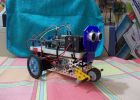
LDR Robot (15 / 15 steg)
Steg 15:
Ladda upp här koden för att ha din robot söker ljus och attackera objekt i sin väg med servo.Kod:
(http://www.egrobotics.com/instructions/code/robotattack.ino)
#include < Servo.h > #define IRsensorPin 11 CONST int RightSensor = 2; int IR; void IR38Write() { void loop() { Serial.Print ("vänster Sensor ="); om (SensorLeft > SensorRight & & SensorDifference > 75 & & IR == hög) { } om (IR == låg) { om (SensorLeft < SensorRight & & SensorDifference > 75 & & IR == hög) { annars om (SensorDifference < 75 & & IR == hög) {
Servo myservo;
#define IRledPin 10
CONST int LeftSensor = 0;
int SensorLeft;
int SensorRight;
int SensorDifference;
för (int jag = 0; jag < = 384; i ++) {
digitalWrite (IRledPin, hög);
delayMicroseconds(13);
digitalWrite (IRledPin, låg);
delayMicroseconds(13);
}
}
void setup() {
myservo.attach(5);
pinMode (IRledPin, OUTPUT);
digitalWrite (IRledPin, låg);
pinMode (8, OUTPUT);
pinMode (9, OUTPUT);
pinMode (LeftSensor, indata);
pinMode (RightSensor, indata);
Serial.BEGIN(9600);
Serial.println ("\nBeginning ljus söker beteende");
}
IR38Write();
IR = digitalRead(IRsensorPin);
Delay(50);
SensorLeft = 1023 - analogRead(LeftSensor);
Delay(1);
SensorRight = 1023 - analogRead(RightSensor);
Delay(1);
SensorDifference = abs (SensorLeft - SensorRight);
Serial.Print(SensorLeft);
Serial.Print("\t");
Serial.Print ("rätt Sensor =");
Serial.Print(SensorRight);
Serial.Print("\t");
Serial.println("left");
digitalWrite 8, hög.
Delay(250);
digitalWrite 8, låg.
Delay(100);
Delay(500);
digitalWrite 8, hög.
digitalWrite (9, hög).
myservo.write(30);
Delay(200);
myservo.write(130);
Delay(200);
digitalWrite 8, låg.
digitalWrite (9, låg).
Delay(250);
}
digitalWrite (9, hög).
Delay(250);
digitalWrite (9, låg).
Delay(100);
}
Serial.println("forward");
digitalWrite 8, hög.
digitalWrite (9, hög).
Delay(500);
digitalWrite 8, låg.
digitalWrite (9, låg).
Delay(250);
}
Serial.Print("\n");
}
Nu när du har slutfört ledningarna och kodning för din robot är det dags att göra roboten ser unik! Använd den medföljande material och material av din egen att göra roboten ser eller agera på det sätt du vill ha den. Ta en titt på ett valfritt avsnitt som hjälper dig med ledningar extra lysdioder och andra ytterligare ändringar. Tack för att bygga denna robot! Vi vill gärna se en bild och höra en berättelse! Vänligen maila oss bild eller berättelse på robotar

LDRs + Arduino = en enkel robot som kan känna av ljuset!

ANTI MISSIL ROBOT

555 timer baserade ljus söker robot

En enkel linje efter robot med transistorer

Arduino ljus efter Robot och undvika

Arduino sol spårning Robot

Automatisk färg detektor med LDR

Jeff-en billig och enkel Ic robot

Ljus efter Plant Robot

Linjen följa robot, ingen programmering krävs

Larm med ic555 och ldr

Enklaste ljuskälla anhängare Robot

Enkla ljus följande Robot

"Ramses' - autonomus robot på spår
Actobitty 2 hjul objekt undvikande robot

Gör en enkel tvåbent Humanoid Robot (Servo Walking Robot)

Robot Arduino fysiska Etoys Lego Technic 9390

BOE Bot/Arduino raden efter robot
