Omni hjulet mobil robot - IoT

I denna anvisning som jag kommer att presentera dig design av omni hjulet mobil robot kontrolleras via wi-fi. Den väsentliga skillnaden jämfört med konventionella kontroll som bluetooth eller radiokontroll är att roboten är ansluten till lokalt nätverk (LAN) och kan användas som IoT mobilenhet. Hjärtat i systemet är Arduino Mega 2560 och Dragino Yun sköld. Dragino Yun är baserad på OpenWrt Linux och ger några användbara funktioner. En av dem är förmåga över luften kod uppladdningen till Arduino ombord. Det kan också administreras webben GUI och SSH och har inbyggd webbserver.
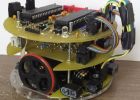
I detta projekt använde jag 4 kontinuerlig rotation servon kontrolleras av Mini Maestro 12-kanals servo controller. Förresten ville jag testa rörligheten för robot med omni hjul, så jag använde fyra 40mm Dagu omni hjul. Denna mobil robot är utrustad med två kraftkällor. En för att leverera servon (Power bank 10000 mAh) och den andra att leverera Arduino och Dragino (Li-Po batteri 1800 mAh).
För att bygga den robot chassin har jag använt en bit av plåt med en tjocklek av 2 mm och en bit av pvc plåt med en tjocklek på 5 mm. Sedan gick jag med de två plattorna med skruvar för konstruktion förstärkning. Dessutom har jag limmade servon till i base med självhäftande tejp.
Komponenter i projektet:
- Arduino Mega 2560 x1
- Dragino Yun sköld x1
- Mini Maestro 12-kanals USB servo controller x1
- Kontinuerlig rotation servo AR-3603HB x4
- Dagu omni hjul - 40 mm x4
- Driva bank 5V 10000 mAh x1
- Li-Po batteri 7, 4V 1800 mAh x1
- Byglar och kablar
- Och muttrar
- Chassi av metall eller plast

Arduino Omni hjulet Robot Rover - gör kursen

Hur man gör en låg kostnad Mobile Robot plattform

Bygga din egen Max 95 mobil Robot bas

Chefbot: En DIY autonoma mobil robot för att servera mat på Hotell

Mobil robot kontrollerad med bluetooth

Parker1 WiFi / 4 G Mobile Robot

Autonoma mobil Robot med ROS clumsybot

Mobil Robot Arm DoArm S7 av wifi Arduino uno r3
Micromouse(Mobile Robot) IR-avstånd givarkort + tips

CHAMPION 4Omni Wheel fotboll Robot!

Wii NunChuck kontrollerade Mindstorms NXT fotboll Robot

Carlitos' projekt: Trådlös tal-kontrollerade Arduino Robot

DIY autonoma linje spårning med hinder undvika Robot (Rover)

BucketBot: En Nano-ITX baserat Robot

Laser skär Omni hjul

Swarmscapers: Autonoma mobila 3D-utskrifter robotar

Rulle-E [Upcyled E-avfall Robot]

Arduino 3D tryckta robot: Humbot Sargantana
