Quadcopter datavisualisering med Plotly (6 / 7 steg)
Steg 6: tester



Jag gjorde några tester innan den giltiga. Jag testade sensorer, kommunikation och tjänsten Ploty. I mitt första försök med Ploty använde jag sin tutorial, som du hittar väl förklaras i nästa länk. De använder en WiFi sköld, men det är lätt att ändra koden för att använda den på Ethernet shield och dessutom biblioteket ger exempel på hur du använder med en Ethernet-shield. Det är mycket lätt. Följ bara följande steg:
- Anslut Ethernet shield till arduino,
- Anslut Ethernet-kabeln.
- Programmera arduino.
- Power arduino.
- Öppna en seriell terminal
- Vänta lite tid vid anslutningen till Plotly webbtjänsten, och efter några sekunder den skriver i serial-uttaget webbsideadress där du kan se resultaten (titta på bilderna för att se ett exempel)
- Öppna en webbläsare, skriv riktningen av serial-uttaget
- Njut av dina data!
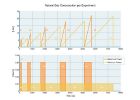
Man kunde se två grafik med de bullerdata som producerar analoga stiften med ingenting ansluten. Det bevis att systemet fungerar.
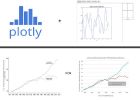
Man kunde se två grafik med de bullerdata som produceras av analoga stiften med ingenting ansluten. Det visar sig att systemet fungerar. Nästa steg är att använda det program som visar de data som du verkligen vill få. I mitt fall använder jag Plotly för två åtgärder: för det första att få rulle vinkeln på min IMU sensor och visa resultatet. Bilden visade vinkeln av accelerometern, vinkeln av gyroskopet och två vinklar sensor fusion, som erhålls med hjälp av Kalman och den som erhålls med hjälp av kompletterande filter.
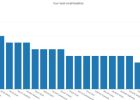
I min andra experiment använde jag barometrisk sensorn, som visade i Plotly trycket, temperaturen och höjden i förhållande till havet-jämna av enheten.

Maximera sömn med Plotly och sömncykel
Analysera din Facebook data med Plotly

Real Time temperatur loggning med Arduino, NodeJS och Plotly!

Harmonisk analys (THD) av en likriktare med hjälp av MATLAB och Plotly

Quadcopter med hjälp av Intel Galileo och Android App

Plotly + Atlas vetenskapliga: graf realtid upplöst syre med Raspberry Pi

4$ super billiga Quadcopter Aluminium ram

En SK450 död katt Quadcopter att kalla din egen

Billiga ready-to-fly FPV quadcopter: 65 kr / $100, 100 meter range utomhus

Arduino och Plotly baserat seismograf

Quadcopter

Enkel Remote Data plottning med Android / Arduino / pfodApp

Bygga ett högpresterande FPV Camera Quadcopter

Raspberry Pi - datavisualisering

Hur man bygger Silver blad FPV Quadcopter
WebPlotDigitizer, Styling grafer & Plotly
Hur du använder Plotly MATLAB/Octave API
Dataöverföring av icke-internet ansluten solvärmesystem med Arduino, PHP och MySQL