Quadcopter datavisualisering med Plotly (4 / 7 steg)
Steg 4: kod

Koden är inte helt förklaras, bara de viktigaste delarna. Fortfarande, du kan hämta koden och jag tror det är ganska väl förstådd. Om du har tveka några frågor inte att fråga.
Koden består av 3 filer, den viktigaste av dem med huvudkoden, initiering sensorer, debug, huvudloop, etc. En annan fil för att styra accelerometern och gyroskop och en tredje för barometer och temperatur sensorer. Först definierar vi konstanter och variabler som programmet kommer att använda. För Plotly definierar vi tre variabler:
#define num_traces 4
Är antalet data variabler vi vill visualisera, i vårt fall 4.
char * streaming_tokens [num_traces] = {"your_plotly_stream_token", "another_plotly_stream_token",...};
Här anger vi nycklarna till vår stream tokens, var och en för varje variabel data.
plotly graf = plotly ("your_plotly_username", "your_plotly_api_key", streaming_tokens, "your_plotly_filename", num_traces);
Slutligen måste en datatyp för att möjliggöra arduino att ta kontakt med vår Plotly tjänst, vi ange namnet på vårt Plotly konto, API-nyckel och namnet på filen som lagrar data.
Huvudkoden initierar sensorerna och konfigurerar Ethernet shield för att etablera kontakt med Plotly web service.
I slingan utföra vi funktionen varje 100 millisekunder. Det innebär att våra prov frekvens är 10 Hz (vi kan använda andra frekvens som 100 eller 1000 Hz). Denna funktion tar värdena på sensorn, bearbeta dem (Kalmanfilter, kompletterande filter,...), och slutligen skickar data till tjänsten Plotly.
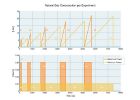
Jag gjorde två program, en för Använd datan av accelerometern och gyroskop, skickar fyra vinklar till Plotly, och en andra en som mäter temperaturen och trycket och skickar dessa värden plus höjdvärdet tidigare beräknas till Plotly.

Maximera sömn med Plotly och sömncykel
Analysera din Facebook data med Plotly

Real Time temperatur loggning med Arduino, NodeJS och Plotly!

Harmonisk analys (THD) av en likriktare med hjälp av MATLAB och Plotly

Quadcopter med hjälp av Intel Galileo och Android App

Plotly + Atlas vetenskapliga: graf realtid upplöst syre med Raspberry Pi

4$ super billiga Quadcopter Aluminium ram

En SK450 död katt Quadcopter att kalla din egen

Billiga ready-to-fly FPV quadcopter: 65 kr / $100, 100 meter range utomhus

Arduino och Plotly baserat seismograf

Quadcopter

Enkel Remote Data plottning med Android / Arduino / pfodApp

Bygga ett högpresterande FPV Camera Quadcopter

Raspberry Pi - datavisualisering

Hur man bygger Silver blad FPV Quadcopter
WebPlotDigitizer, Styling grafer & Plotly
Hur du använder Plotly MATLAB/Octave API
Dataöverföring av icke-internet ansluten solvärmesystem med Arduino, PHP och MySQL