Raspberry Pi Cam Tank v1.0 (4 / 8 steg)
Steg 4: Konfigurera Pi
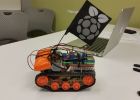
Detta är den viktigaste delen, hjärtat av vår tank--Raspberry Pi!
Om du have't spelat Raspberry Pi ännu. Jag rekommenderar för att börja med denna bok: komma igång med raspberry pi av MAKE. Du kan få grunderna och en omfattande förståelse av Pi.
Få de senaste raspbian OS.
Den nästa verktyg jag rekommenderar mycket är fjärrskrivbordet. Härär handledningen av Adam Riley. När du ställer in, kan du Visa Pi skrivbordet på din dator (inte testat på Mac). Således du kör Pi "naken", betyder inget behov av en bildskärm, mus och tangentbord. Några av mina vänner använder ssh-Kommandotolken. Men jag föredrar skrivbordet.
Utifrån tidigare forskning, visste jag Raspberry Pi är kapabel att strömma video. Så började jag att röra runt med olika apps på Pi. Många av apps antingen har en lång lag(seconds) eller har en låg bildhastighet. Efter några veckors vandring på online video och tutorials, lyckligtvis hittade jag lösningen. En video på youtube om webiopi gav mig en hel del hopp. Mer forskning gjorde jag tror detta är rätt väg att gå.
Webiopi är en ram som gjorde kopplingen mellan Pi och andra internet-enhet verkligen enkelt. Det kontrollerar alla Pi GPIOS och sedan starta en server innehåller anpassade html. Du kan få tillgång till denna html från andra enheter (dator, smart telefon, etc), och klicka på en knapp i webbläsaren i wifi avstånd, en GPIO utlöses.
Den video fick mig full av hopp, bygger på ett webiopi tutorial--cambot projektet. Det är med på MagPi magzine #9 [html] [pdf] och #10 [html] [pdf]. Tack Eric PTAK!
Genom att följa handledningen steg för steg, kan du göra att två hjul cambot! Här är hur det fungerar: ansluta två motor med en H-bron och sedan styra H-bron med 6 GPIO stift att styra riktning och hastighet. Webiopi används för att styra GPIOs. Och MJPG-streamer används för strömmande video.
Om du är ny till Pi eller Linux som jag var månader sedan, kanske du har ett litet problem när du har följt alla steg. Du kan köra python kod för webiopi och strömmande video separat men vet inte hur man kör dem tillsammans? Det tog mig ett tag att veta kan du lägga till en & efter ett kommando (& är verkligen svårt att söka på google, BTW), som innebär att du vill det här kommandot körs i bakgrunden. Så kommer att jag göra detta varje gång:
sudo python cambot.py &
sudo./stream.sh
Jag tror du skapa ett bash fil som innehåller ovanstående kommando till en fil och köra en gång. Jag har inte provat ännu.
Så jag försökte denna grundinställning med två DC-motor, det går, men motorn jag har är inte tillräckligt kraftfull. Leder mig till ett annat alternativ: kontinuerlig servon.
Ny fråga kommer därefter: är webiopi stödja PWM kontrollerade servon?
Svaret är ja, men inte genom sin egen: RPIO behövs för att generera programvara PWM
RPIO installation (Jag har ingen lycka på den första apt-get install-metoden. Github metoden fungerar bra för mig)
Exempelkod och andra diskussioner
Nu är din bot uppgraderade med två servon! Tänk på vad du kan göra med de extra armarna!
Jag ändrade den ovanstående exempelkoden för att passa min tank. Du behöver inte en dator examen att göra detta. Du är bra så länge du kan förstå exempelkoden och vet vad man ska kopiera och var man byter.
Kul Pi: s Raspberry Pi 3 Tank

Raspberry Pi Spy Tank

RPiScope: raspberry pi Mikroskop, bygga från laserskurna akryl delar
Magen shot - Halloween kostym 2014

Dölj ditt RasPi moln i slätt sikta

PetBeHome: En enhet som låter dig prata med din pälsklädda vän för Under $100

Raspberry Pi: Helt trådlös IP-kamera. Solar Battery Pack, WiFi, Logitech Camera, Raspbian

Övervakaren för trådlös trafik tank robot baserad på raspberry pi

Lätt Raspberry Pi säkerhet Cam med automatisk webböverföring

Raspberry Pi säkerhet Cam

RC tank med en glidande FPV camera

Raspberry Pi kamerabaserade Mikroskop med LEGO delar

Bilen hallon Pi3 Dash Cam

Pekskärm och uppladdningsbart batteri för PiKon teleskopet / Raspberry Pi

NaCade - den nakna Raspberry Pi Arcade maskin

PiTank - en web kontrollerade tank med kanon och direktuppspelad video

Raspberry Pi Motion känsliga kamera

Raspberry PI night vision goggles.
