Raspberry Pi Cam Tank v1.0 (2 / 8 steg)
Steg 2: Köra systemet









Suspension
Först gjorde jag en prototyp utan uppskov, bara axlar över de lägre skrovet med kullager och hjul. Men tänker på operatörens komfort (jag kommer för att köra det du tittar på strömmande video!), bestämde jag mig att lägga till uppskov för att göra det svalare.
Allt jag har är några coil springs, inte hydrauliska, ingen bladfjäder. Jag experimenterade lite torsion bar mekanism med PLA först. (Torsion bar upphängning är vanligt på vissa tankar). Visar sig efter ett par twist, tryckta PLA baren skulle få mjuk och så småningom bryta. ABS kan vara bättre för ändamålet men jag har aldrig provat. Så, efter ytterligare forskning, fann jag Christie upphävandet design, här är en kort video visar hur det fungerar.
Dock christie upphävandet har så många små delar, och jag har inget förtroende för min skrivare sedan. Så gjorde jag några fjädring som denna.
(bild)
Denna konfiguration upptar för mycket inre rum. Så rotera jag den inre arm 90 grader. Observera att första och sista hjulet fick en kortare
Bakre spännaren
Jag tänkte när tanken kör över några hinder, idle hjulen kan flyttas upp och banan kommer att förlora spänning. Så la jag några spännaren mekanism på bakhjulet. I princip kraft det är två fjädrar trycka den verkliga axeln hela tiden, utöva vissa på det snäva spår.
Drivhjul och spår
Jag designade denna banddrift och drivhjul i solidworks. Jag vet inte mycket om maskinteknik inte kan således göra beräkningen redskap. Så simulerade jag delar i solidworks att se om det fungerar innan jag slog på utskriftsknappen. Varje spår är ansluten med några extra 3mm glödtråden. Det fungerar ganska bra med lite slipning. Men spår design har ett fel, ytan röra marken är för mjuk att det är svårt att greppa. Om jag skriver ut det upp och ner, jag skulle kunna lägga några slitbanan, men det kommer att kosta en hel del underlag på grund av tanden. Framtida lösningar: 1: skriva ut tanden separat sedan limma dem tillsammans. 2. applicera lite gummi beläggning sprayfärg.
Då jag tryckt Boende servon och kontrollera drivhjul kan kopplas till servo armen med skruvar.
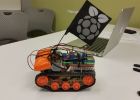
Kul Pi: s Raspberry Pi 3 Tank

Raspberry Pi Spy Tank

RPiScope: raspberry pi Mikroskop, bygga från laserskurna akryl delar
Magen shot - Halloween kostym 2014

Dölj ditt RasPi moln i slätt sikta

PetBeHome: En enhet som låter dig prata med din pälsklädda vän för Under $100

Raspberry Pi: Helt trådlös IP-kamera. Solar Battery Pack, WiFi, Logitech Camera, Raspbian

Övervakaren för trådlös trafik tank robot baserad på raspberry pi

Lätt Raspberry Pi säkerhet Cam med automatisk webböverföring

Raspberry Pi säkerhet Cam

RC tank med en glidande FPV camera

Raspberry Pi kamerabaserade Mikroskop med LEGO delar

Bilen hallon Pi3 Dash Cam

Pekskärm och uppladdningsbart batteri för PiKon teleskopet / Raspberry Pi

NaCade - den nakna Raspberry Pi Arcade maskin

PiTank - en web kontrollerade tank med kanon och direktuppspelad video

Raspberry Pi Motion känsliga kamera

Raspberry PI night vision goggles.
