Raspberry Pi CD Box Robot (4 / 4 steg)
Steg 4: Nu får det här att fungera!

Engelska
Nu kommer den svåraste delen för mig: programmering.
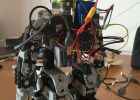
Vi har gjort de första testerna med motorer, med hjälp av denna handledning, att göra nödvändiga justeringar om pinut av mina motorer.
Tanken vi har är följande:
- Roboten rör sig framåt tills den stöter på ett hinder på 30 cm den (med hjälp av ultraljud sensorn).
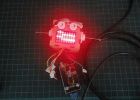
- Det minskar din hastighet med hälften och börjar titta runt (flyttar servomotor).
- Sök det friaste sättet (med mer avlägsna hinder eller inget hinder), vänder robotens kropp och startar om slingan.
Jag har studerat hur det skulle göra i början med hjälp av GPIO efter dessa tutorials http://cymplecy.wordpress.com/scratchgpio/scratch-raspberrypi-gpio/
Efter att jag upptäckte Wyliodrin och verkade också ganska intressant.
Slutligen, det finns alltid bra gamla Python.
Vi följer...
Portugisiska
Agora vem en parte mais desafiadora para mim: programação.
Nós já fizemos os primeiros testiklarna com os fenor, usando esse tutorial, fazendo som Lydia adaptações referentes à pinagem dos meus fenor.
En idéia que temos é en seguinte:
- O robô se flytta para frente até encontrar um obstáculo en 30 cm dele (usando o sensor ultrasonico).
- Ele reduz sua velocidade à meta e começa a olhar para os Linder (movimentos göra servomotor).
- Procura o caminho mais livre (com obstáculo mais fjärran ou nenhum obstáculo), gira o corpo göra robô e reinicia o slinga.
Estive estudando como seria fazer em Scratch, usando GPIO seguindo esses tutoriais http://cymplecy.wordpress.com/scratchgpio/scratch-raspberrypi-gpio/
Depois eu acabei descobrindo o Wyliodrin e também mig pareceu bastante interessante.
Por fim, sempre resta o bom e velho Python.
Seguimos...

Raspberry Pi och ROS (Robotic Operating System)
Hur man bygger en Raspberry Pi noll Humanoid Robot med Java

Raspberry Pi regn Box

Raspberry Pi baserade RFID Music Robot

Raspberry Pi Roboat

Hur man bygger robot halloween kostymer.

Styr en Robot med en Wii Remote

Haptisk robot Finger
Lägg 40 lysdioder och hjärnan i Robot huvud

BrickPi Setup

Webbläsare kontrolleras Bot

BoBoBoT 5MP 1080 HD säkerhet kameran Raspberry Pi Security Robot

Raspberry Pi Robot kontrollerad via Bluetooth

Bygga din Internet kontrollerad Video-Streaming Robot med Arduino och Raspberry Pi

Lägg till 6 ultraljud avstånd sensorer till befintliga Raspberry Pi Robot

CupBots - 3D tryckt Robotic plattform för Arduino och Raspberry Pi

IoT: Raspberry Pi Robot med Video Streamer och Pan/Tilt kamera fjärrkontroll över internet

IoT - kontrollera en Raspberry Pi Robot över internet med HTML och shell skript endast
