Robotarm spelar luffarschack (5 / 5 steg)
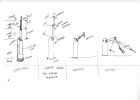
Steg 5: Rörelse av armen

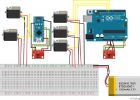
När den artificiella intelligensen av minimax algoritmen avgör i vilken position bit måste placeras, skickar den en sträng med numret på den positionen till arduino genom den seriella porten. Arduinoen tar emot data och enligt de ståndpunkt anrop till funktionen som innehåller rörelserna i vinklar för att flytta robotarmen.
Exempel på kod för att flytta armen till andra torget:
om (dato == '2')
{
segundaPosicion()
}
......
void segundaPosicion()
{
Flytta basen
för (jag = 180, jag > = 88; i--)
{base.write(i);
Delay(20);
}
Delay(200);
Rör sig handleden till 90
för (jag = 114; jag > = 90; i--)
{
codo.write(i);
Delay(20);
}
Delay(200);
Flyttar axeln till 160
för (jag = 140; jag < = 170; i ++)
{hombro.write(i);
Delay(20);
}
Delay(200);
Rör sig handleden
för (jag = 90; jag < = 102; i ++)
{
codo.write(i);
Delay(20);
}
Delay(200);
Öppna griparen
för (jag = 110; jag > = 90; i--)
{
Pinza.write(i);
Delay(20); }
Delay(200);
Upp axeln
för (jag = 170; jag > = 140; i--)
{
hombro.write(i);
Delay(20);
}
Delay(200);
posicionInicial(); Flyttar till utgångsläget
}
Hämta den fullständiga koden i arduino här
Tack för att titta på, kommentarer, sugestions, låt mig veta det.

Tic Tac Toe maskin

Robot Arm Controll + automation

3D tryckt robotarm

En multi kontrollerad hög Precision stationära robotarm

Hur man bygger en enkel robotarm från Lego Mindstorms NXT?

Synkronisera robotarm handledning

Bygga en robotarm för Science Olympiad

Hur man bygger en robotarm
Skriva ut en robotarm
Styrda robotarm med gester

Autonoma Tank med robotarm (Arduino, Bluetooth)

3D skriva ut 4 gaffel robotarm (FULL TUTORIAL)

Intelligent Arduino Uno & Mega Tic Tac Toe (luffarschack)

Kontrollera din robotarm, Cool sätt

Bygga Lego MP3-spelare

Klara täckning för din MP3 spelare!

Counter Strike spel spelare Assault Hoodie

Casset spelare säker
