Styra servon via Bluetooth (RN-42) och LabVIEW (5 / 5 steg)
Steg 5: Telefon ansökan och efterbehandling förklaring



För detta projekt använde jag Joystick bluetooth befälhavare på Android (bilden ovan). Öppna programmet och ansluta till PmodBT2. Min PmodBT2 fick namnet RNBT - A5CF. En gång kopplet, bör du kunna läsa 8 ASCII-byte i rådata indikatorn (en tom, sex för UDLR och en avsluta överföringen byte).
När joysticken står stilla, kommer att PmodBT2 läsa 200 i både X- och Y-värden. Dessa värden sträcker sig från 100 till 300 beroende på platsen för styrspaken. I app-alternativ, se till att du anger data överföring intervall till 100 ms och när sysslolös, skicka data kontinuerligt (både bilden ovan).
Beroende på joystick orientering flyttas servon därmed. Till exempel om joysticken upp och till vänster, att servon gå vänster och upp (ett servo för varje axel).
Du är klar! Försök att använda detta som en guide för att ställa in bluetooth-anslutningen.

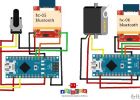
Styra servon med hjälp av SSC-32 Servo Controller och Arduino Uno

Styra Arduino med Android-telefon via Bluetooth

Hur man styr en arduino bil via Bluetooth (för nybörjare)

Styra Roomba över Bluetooth via Brainlink

Styra arduino med visual studio via bluetooth
Göra en Android App att styra via Bluetooth en Arduino kontrollera ditt hus via RF, alla med AppInventor

Hur du vill att telefonen med Android att kontrollera servon via ljudkanal

Android kontrollerade RC bil med Video i realtid via Bluetooth & Wi-Fi

Styra servon på FPGA

Mindflex EEGEN med raw-data via Bluetooth

Raspberry Pi Robot kontrollerad via Bluetooth
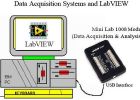
MiniLab 1008 och LabVIEW

Hur man kontrollerar arduino via bluetooth från (PC, pocket PC PDA)

Smart power socket kontroll från din smartphone via Bluetooth

Arduino - kontroll likströmsmotor via Bluetooth

Programmera din Arduino med en Android-enhet via Bluetooth

Hur man styr knäckt (trasiga) skärm och glas Android (eller båda) och återvinna dem.

Arduino röst erkännande Via Bluetooth HC-05