Styra servon via Bluetooth (RN-42) och LabVIEW (2 / 5 steg)
Steg 2: ledningar!


Okej nu när vi har reservdelar, måste vi sätta ihop dem!
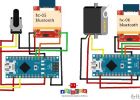
Kolla in bilden ovan för att se till att du har rätt bygel setup. Detta försäkrar att styrelsen kan utgång 5V nödvändigt att driva micro servon.
Nästa, låt oss tråd upp PmodBT2. Från PmodBT2 referens manual, kan vi se att det första stiftet på kontakt J1 är RTS och sedan hela vägen till stift 12 anslutningarna är: RX, TX, CTS, GND, VCC, STATUS, ~ RST, NC, NC, GND och VCC igen. Eftersom WF32 inte har CTS och RTS anslutningar, bara binda dessa pins till marken. Nästa, bifoga RX och TX enligt sekundära UART anslutningen av WF32 (UART1). I det här fallet TX för WF32 är stift 40 och RX för WF32 är pin 39. Ansluta TX för WF32 till RX för PmodBT2 och Anslut RX för WF32 till TX för PmodBT2. Annat anges, Anslut det andra stiftet på PmodBT2 till stift 40 på WF32 och det tredje stiftet på PmodBT2 till stift 39 på WF32.
Anslut stift 7 på BT2 till stift 26 på WF32 och Anslut stift 8 på BT2 till stift 27 på WF32. Också, Anslut marken och 3.3V anslutningar till PmodBT2 (Glöm inte att knyta CTS och RTS till marken).

Styra servon med hjälp av SSC-32 Servo Controller och Arduino Uno

Styra Arduino med Android-telefon via Bluetooth

Hur man styr en arduino bil via Bluetooth (för nybörjare)

Styra Roomba över Bluetooth via Brainlink

Styra arduino med visual studio via bluetooth
Göra en Android App att styra via Bluetooth en Arduino kontrollera ditt hus via RF, alla med AppInventor

Hur du vill att telefonen med Android att kontrollera servon via ljudkanal

Android kontrollerade RC bil med Video i realtid via Bluetooth & Wi-Fi

Styra servon på FPGA

Mindflex EEGEN med raw-data via Bluetooth

Raspberry Pi Robot kontrollerad via Bluetooth
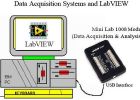
MiniLab 1008 och LabVIEW

Hur man kontrollerar arduino via bluetooth från (PC, pocket PC PDA)

Smart power socket kontroll från din smartphone via Bluetooth

Arduino - kontroll likströmsmotor via Bluetooth

Programmera din Arduino med en Android-enhet via Bluetooth

Hur man styr knäckt (trasiga) skärm och glas Android (eller båda) och återvinna dem.

Arduino röst erkännande Via Bluetooth HC-05