Styrbara kontinuerlig spår koncept (1 / 7 steg)
Steg 1: Designa spår/slitbanor






* UPPDATERING *
Eftersom många inte märker avsnittet skrev jag på att förhindra sidledes drivande av spår/spår glider av. Jag vill notera dess på steg 5. Jag har också lagt till renderingar med lätting hjul och "suspension" eftersom jag vet dess TLDR (för lång din't läsa)
Den största skillnaden jämfört med traditionella track system är att vi behöver för att kunna rotera ett avsnitt av spåret i ytterligare en dimension för att vända. Varje länk bör ha 2 frihetsgrader i form av rotation.
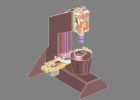
Jag började med en skiss på hur jag vill att det ska fungera. Varje länk kommer att göras av 2 delar där i ena änden vi tillåta rotation i ena axeln och på andra änden rotation i en vinkelrät axel.
Jag namnge den del som kommer att kontakta marken som "Main plattan" och den del som ger ytterligare flexibilitet heter "Pivot plattan"
Den viktigaste plattan behöver för att kunna svänga runt närgränsande huvudsakliga plåtar samtidigt maximera kontakt med marken. För detta används en halvcirkel för framsidan. För att säkerställa att den intilliggande Huvudplattan pivots korrekt, pivot ska placeras i mitten av cirkeln. På baksidan, jag gjorde en "hackade" av halv cirkel, hugga ut svansen gör det möjligt att stänga ordentligt (se bild).
Som för pivot plattan, eftersom det är närmare till "hjulen" än den viktigaste plattan är, är det också pivot Plates jobb för vissa gränssnitt som gör att kraften överförs till spåren. Pivot plattan kommer också att ha vissa gränssnitt yta med guide rullarna som vi kommer att täcka senare. Pivot plattan är i grunden har en slutet som gör en viktigaste plattan att rotera om en axel och en annan slutet som gör nästa viktigaste plattan att rotera kring en vinkelrät axel. Den har också en stor utstick som gör att enheten cog att engagera det och vända spåret, ungefär som kuggstångsdrivna gears.
Jag gjorde också en PIN-kod bara för att hålla det tillsammans. Men i efterhand kan vi nog utesluta detta stift som möjliggör snabbare beräkning i rörelse analys (täcks senare) eftersom de kompisar definieras kommer att räcka

Kontinuerlig mesh (positivt engagerande) CVT

Koncept för en skulptural akvarium Installation / / KRYPSKYDDZON
Kontinuerlig Top-Down DLP experiment

Koncept: Icarus, lönn frö & Beetle Wing-typ hoppa fallskärm.
Kontinuerlig flow aluminiumsmältverk

Dolda blad koncept

EL wire att hjälpa små barn - ett koncept

Varmt/kallt justerbar kontinuerlig belysning

DIY ALLT I EN DATOR; Koncept till verklighet "komplett"

Konvertera mikro-servon för kontinuerlig Rotation

Minska temperaturen i magnetventil för kontinuerlig körning

Hur du ändrar en servomotor för kontinuerlig rotation (en motor walker robot)

Göra en CPAP (kontinuerlig positiv Airway Pressure) slang hållare för sömnapné

Rainstick; Riktigt, riktigt stor och kontinuerlig.

Hur man knyter en kontinuerlig halv Hitch Spiral Knut för hampa smycken

Knex Gun koncept (spaken semi-auto)

Knex hagelgevär koncept

Nytt Knex Mag koncept
