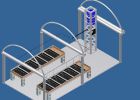
Autonoma fotbollsspel



> Åtta servomotorer används för att manipulera handtagen på fotbollsspel
> En mikrokontroller till aktivera servomotorer och kommunicera med datorn
> En över huvud monterad webbkamera för att spåra bollen och spelare
> En dator för att bearbeta de webcam bilderna, implementera artificiell intelligens och kommunicera med mikrokontroller
Budgetrestriktioner för prototypen saktade projektet några och höll sin funktionalitet till ett minimum. Ordentlig motorer att flytta spelare med en konkurrenskraftig hastighet befanns vara mycket dyrt, så nedre änden servon fick användas.
Medan detta särskilt genomförande begränsades av kostnad och tid, skulle en större utväxling ge en snabbare spela robot, även om detta skulle kosta mer än $500 grundpriset (pris utan strömförsörjning & dator).

Hur att ange Instructables och Universal Laser Cutter tävling

Låg kostnad Hobby Servo XY bord

PiniSEA - en autonom ocean båt - havet Tracker

Autonomi filterpåse konstruktion

Autonoma solar driv tweeting fågelbordet

Autonoma, kartong, Rasberry Pi kontrollerade QuadCopter

AUTONOMA HOOVER (Intel IOT)

Arduino autonom gräsklippare som CutFlower

Autonoma AR papegoja Drone 2.0 flygande
Autonoma växthusgaser Factory

Autonoma programmering Intro

Autonoma Sentry tornets

Autonoma Solar Robot steg 1

Autonoma Sumo bekämpa Robot med pneumatiska Flipper - hur man

Autonoma Traxxas Rover bygga

Autonoma drone som du redan har i din ficka!

Bita hinder autonom Robot «Sanglier» (vildsvin)

Autonoma fordon
