Autonoma Sumo bekämpa Robot med pneumatiska Flipper - hur man (10 / 12 steg)
Steg 10: AI och komponentkod gränssnitt



Kringgå en annan robot har samma krav som attackerar. En ytterligare extra som krävs för skatteflykt är antingen en omvänd eller sida inför sensor för att hålla reda på förföljande roboten. Alternativt kan roboten flytta bakåt.
Sumo robot autonoma förmågor krävs endast att vara ganska grundläggande. Att skapa robotens autonomi styrkoden bör kunna klara av avläsningarna från alla inbyggda sensorer och reagera på hot på ett snabbt och effektivt sätt.
För att roboten att utföra uppgifterna som krävs av autonoma attackerar och kringgå en reaktiv kodstruktur genomfördes. Detta resulterade i en smidig robot som kan svara snabbt på motståndarens åtgärder.
När första påslagen sumo roboten i en läge urval stat, identifieras med den blinkande blå indikatorn LED, detta tillstånd varar i 5 sekunder. Detta tillstånd kan användaren välja mellan en undgå läge eller en autonom Sumo konkurrens / Attack läge.
Roboten går automatiskt undgå läge om användaren inte trycker på röda knappen under läge val av staten. En gång i undgå läge indikator LED blinkar grönt, visar att roboten väntar på dess startkommando.
För att välja den autonoma Sumo konkurrens / Attack läge användaren måste trycka på den röda knappen under läge val av staten. I den autonoma Sumo konkurrens / Attack läge lysdioden kommer flash röd, som visar roboten väntar på dess startkommando. När start-knappen är pressar respektive LED färgerna blinkar snabbt i 5 sekunder, under denna tid måste användaren gå mer än 1,5 m från arenan. LED blir då färgen och roboten börjar dess valt läge.
Undgå läge mål
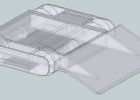
Det huvudsakliga målet för undgå mode är att undvika kontakt med ett förföljande objekt, bibehållen inom den arenan gränsen. Detta uppnås genom att hitta objektet och sedan följa upp det med de två främre ultraljudssensorer. Förföljande objektet spåras på plats tills det blir inom 50cm. Sumo roboten flyttar bakåt försöker hålla 50cm avstånd. Roboten fortsätter röra bakåt tills den kontaktar vita gränslinjen, varvid det roterar från förföljande objektet och flyttar tillbaka mot centrum av arenan. Roboten sedan identifierar objektet igen och processen upprepas. Ett schema av undgå läge visas i bilderna.
Attack-läge mål
Målet för tävlingen autonoma Sumo / Attack-läge är att driva eller vända motståndaren ut från arenan, samtidigt som de inom arenan. Sumo roboten söker efter objekt med dess ultraljudssensorer. När en motståndare finns roboten roterar tills motståndaren är synlig i dess två främre sensorer. Nästa, det rams framlänges och försöker trycka motståndaren ut från arenan. Flipper aktiveras sedan med tanke på följande villkor:
1. motståndaren är synlig för både de främre ultraljudssensorer
2. motståndaren är inom 10cm
Om inte båda dessa förutsättningar är uppfyllda, kommer inte flipper aktivera. När flipper har aktiveras, fortsätter roboten att ram fram och sedan sänka sedan flipper efter 0.75 sekunder. Processen upprepas sedan om det behövs. Ett schema av autonoma Sumo konkurrens / Attack-läge visas i bilderna.
Som nämnts tidigare, är både undgå och attack funktioner av sumo roboten rent reaktiv. Om ett objekt har identifierats, utförs en åtgärd. En reaktiv metod valdes på grund av dess snabba responstid, effektivitet och användarvänlighet genomförandet.
Samverkan med ultraljudssensorer I
Denna tutorial vägleder dig om hur gränssnittet med HC-SR04 ultraljudssensorer.
Gränssnitt ultraljud avståndsmätare med AVR MCU-AVR Tutorial
Linje sensorerna kan enkelt koppla till en digital ingång för AtMega128 MCU. MCU kan sedan läsa sensorerna aktuella tillstånd.
Samverkan med ShiftBrite
ShiftBrite kontrollerades med hjälp av en metod som kallas lite smällar. Det bifogade dokumentet innehåller fungerande exempelkod för samverkan med ShiftBrite.
Gränssnitt med Motor Controller
Den motor controller kräver endast digital hög/låg riktning signaler och PWM signaler. Som en enkel att genomföra med AtMega128.
Naken Singularity: Beetleweight kil bekämpa Robot

Robo-HEJARE - 3lb bekämpa Robot

Bekämpa Robot för Under $250

Titan: 30kg bekämpa Robot under $100

Hur att utforma och bygga en bekämpa robot

Anpassa en gitarr, med vattenrutschbanor. (eller hur man vänder en gratis akustisk gitarr till något du kan känna dig stolt över att jamma med)

Fire Poi med Pro kedjor hur man

Bekämpa SAD med smarta lampor (App-kontrollerade Wake-up Light)

Bekämpa bajs med Kiss, och vinna.

Styra FlappyBird med en ballong, hur man använder Barometer Arduino Sensor för Input

Bekämpa Robotics handledning

Bekämpa robotar

Blitzkrieg: Bluetooth kontrollerad 110lb bekämpa roboten.

Unskinny Bot: 3-lb horisontella Spinner bekämpa Bot

Hur man gör en Meca-penguin Robot

Hur man gör en hemmagjord Longboard med Vinyl Tryck

Hur man dödar Pesky House Gnats, med en hämnd!
Hur man skriver med hjälp av silvertejp
