Autonoma Sumo bekämpa Robot med pneumatiska Flipper - hur man (4 / 12 steg)
Steg 4: Flipper systemet

Flipper har utformats för att tränga in under ett inkommande roboten sedan aktivera. I slutet av flipper är inom 0.5mm från marken, vilket möjliggör penetration under de flesta motståndare. Manöverdonen valt för flipper mekanismen är mikro-pneumatisk baggar.
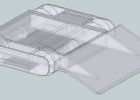
Pneumatik är extremt kraftfull för sin vikt, och är det perfekta valet för denna uppgift. Den kraft som genereras av en enda pneumatiska ram befanns vara otillräckliga för att effektivt vända en motståndare, därför dubbla baggar har använts för att öka lyftkraften för flipper. Rams har en stroke längd 25 mm, som när den kombineras med flipper design genererar tillräcklig höjd för att störta en motståndare. Komponenterna i flipper systemet visas i bilden.
Flipper är aktiverat använder utbud information som samlats in från de två främre ultraljudssensorer. Tryckluften lagras i en 100cc cylinder. En kompressor används för att sätta press på systemet till 115 psi. Pneumatiska rams styrs av en servo drivs pneumatiskt switch; en schematisk av det pneumatiska systemet ges senare.
Naken Singularity: Beetleweight kil bekämpa Robot

Robo-HEJARE - 3lb bekämpa Robot

Bekämpa Robot för Under $250

Titan: 30kg bekämpa Robot under $100

Hur att utforma och bygga en bekämpa robot

Anpassa en gitarr, med vattenrutschbanor. (eller hur man vänder en gratis akustisk gitarr till något du kan känna dig stolt över att jamma med)

Fire Poi med Pro kedjor hur man

Bekämpa SAD med smarta lampor (App-kontrollerade Wake-up Light)

Bekämpa bajs med Kiss, och vinna.

Styra FlappyBird med en ballong, hur man använder Barometer Arduino Sensor för Input

Bekämpa Robotics handledning

Bekämpa robotar

Blitzkrieg: Bluetooth kontrollerad 110lb bekämpa roboten.

Unskinny Bot: 3-lb horisontella Spinner bekämpa Bot

Hur man gör en Meca-penguin Robot

Hur man gör en hemmagjord Longboard med Vinyl Tryck

Hur man dödar Pesky House Gnats, med en hämnd!
Hur man skriver med hjälp av silvertejp
