Autonoma Sumo bekämpa Robot med pneumatiska Flipper - hur man (6 / 12 steg)
Steg 6: Chassidesign




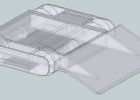
Chassit är tillverkad av 1mm plåt Aluminium med tjockare L-avsnitt Aluminium förstärkning. Den yttre skalet av chassit har utformats för att vikas från ett enda blad 1 mm Aluminium och hålls samman av de förstärkande medlemmar och pop nitar.
Chassit skära ut mönster visas framför och med tanke på senare.
Denna slutliga chassidesign har valts för sin förmåga att leverera hög hållfasthet och styvhet i en lätt enhet.
De design iterationerna kan ses i följande klipp.
Design MK2
Design MK3
Utforma MK4 (nära slutgiltiga design - men sidan ultraljudssensorer togs bort)
Placeringen av de inre komponenterna i chassit kan ses i filmen ovan. Motorerna har placerats så att hjulen sticker tillbaka förbi baksidan av roboten, gör detta att ständig dragning om oavsiktlig montering av en annan robotens ramp uppstår. På grund av batteriet att vara den tyngsta komponenten, det har placerats centralt över hjulet bas att skingra massan jämnt och generera maximal dragkraft.
På grund av det differentiella drivsystemet kan bot på plats vrida när hjulen är spunnet i motsatta riktningar. Därför är effektiva svängradie 0.
PDF av chassikomponenter levereras i slutet av detta instructable.
Naken Singularity: Beetleweight kil bekämpa Robot

Robo-HEJARE - 3lb bekämpa Robot

Bekämpa Robot för Under $250

Titan: 30kg bekämpa Robot under $100

Hur att utforma och bygga en bekämpa robot

Anpassa en gitarr, med vattenrutschbanor. (eller hur man vänder en gratis akustisk gitarr till något du kan känna dig stolt över att jamma med)

Fire Poi med Pro kedjor hur man

Bekämpa SAD med smarta lampor (App-kontrollerade Wake-up Light)

Bekämpa bajs med Kiss, och vinna.

Styra FlappyBird med en ballong, hur man använder Barometer Arduino Sensor för Input

Bekämpa Robotics handledning

Bekämpa robotar

Blitzkrieg: Bluetooth kontrollerad 110lb bekämpa roboten.

Unskinny Bot: 3-lb horisontella Spinner bekämpa Bot

Hur man gör en Meca-penguin Robot

Hur man gör en hemmagjord Longboard med Vinyl Tryck

Hur man dödar Pesky House Gnats, med en hämnd!
Hur man skriver med hjälp av silvertejp
