Enkla objekt avoider robot med Actobotics Runt Rover Peewee chassi och en Arduino (8 / 15 steg)
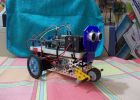
Steg 8: Sensor berget



Om du vill placera servo på bot, skär en liten bit av dubbel sidig tejp och stick på undersidan av SG90 servo. Ta servo och placera det i mitten av de två hålen på framsidan av chassit. Obs: Om du har två skruvar som passar de servo och chassi hål som är tillräckligt lång, kan du använda de :-) Ta plast läsk flaska upp och försiktigt skära en skåra över det (se bilden nedan), tillräckligt bred för sensor styrelsen att glida in. Använd lite varmt lim eller klister på båda sidor för att hålla det på plats. Nu tar servo gränsöverskridande kvarstad horn "+" och limma den på ovansidan av den gemensamma jordbrukspolitiken flaska. Du kan också borra ett litet hål med en liten borr eller ens en liten skruvmejsel in i centrera av toppen för att skydda den ännu bättre på servo med en skruv monteringen.
När du har sensorn redo att montera på servo,
placera den på hornen och sätta servo långsamt och mycket försiktigt hela vägen i en riktning, sedan den andra till räkna ut den mellersta punkten. När du tror att du har det, tryck på sensorn utan skruven tills du är säker på att det är i rätt position.

Enkel rad efterföljare robot med hjälp av en Actobotics Runt Rover spira

Enkla självbalanserande Robot med Galileo Gen 2

Hacka en gammal iPod med hjälp av en Android och en Arduino.

Baldroid v3 balansera Robot med Actobotics delar och IOIO-OTG

Förvandla ett 1970-flipperspel till en atom synkroniserad väckarklocka med hjälp av en gps och en arduino

TurtleDuino objekt undvikande Robot

Gest kontroll car(robot) med Arduino och Android(bluetooth)
Actobitty 2 hjul objekt undvikande robot

Avlägsen kontrollerade robot med Arduino och T.V. remote

Bygga en modulär Robot chassi med Actobotics

Enkla objekt undvikande med Arduino

Enkla ljus söker robot med 555 timing IC

Bygga din Internet kontrollerad Video-Streaming Robot med Arduino och Raspberry Pi

Autonoma Sumo bekämpa Robot med pneumatiska Flipper - hur man

Gör en Wi-Fi styrd Robot med en LinkIt

Hur till spår din Robot med OpenCV

Hinder att undvika Robot med arduino

Arduino 4wd robot med ping sensor "J-Bot"
