Enkla objekt avoider robot med Actobotics Runt Rover Peewee chassi och en Arduino (12 / 15 steg)
Steg 12: Slår på!
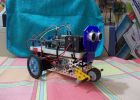
När du gör den senaste anslutningen, kan du hålla bot i ena handen medan göra det eller det kan få från dig! Jag har en 30 sekunders fördröjning vid start för att ge dig lite tid för justeringar. En gång de bot befogenheterna, sensor servo ligger till neutralläge (vinkel 90) och sedan 30 andra dröjsmål börjar. På denna punkt om du behöver flytta sensorn berget, kan du göra så. När förseningen är klar kommer att bot gå framåt om alla anslutningar var rätt och gjorde väl. Om inte, kontrollera dem igen och göra eventuella korrigeringar som behövs. Om de är rätt och sensorn ser centrerad nog, kan du skruva flaska upp till servo med en av servo skruvar som följde med servo. Om roboten rör baklänges eller vända istället för att gå framåt på första flytta, byta motoriska trådarna på sheild terminalerna tills de är korrekt (du kan behöva leka med det några)

Enkel rad efterföljare robot med hjälp av en Actobotics Runt Rover spira

Enkla självbalanserande Robot med Galileo Gen 2

Hacka en gammal iPod med hjälp av en Android och en Arduino.

Baldroid v3 balansera Robot med Actobotics delar och IOIO-OTG

Förvandla ett 1970-flipperspel till en atom synkroniserad väckarklocka med hjälp av en gps och en arduino

TurtleDuino objekt undvikande Robot

Gest kontroll car(robot) med Arduino och Android(bluetooth)
Actobitty 2 hjul objekt undvikande robot

Avlägsen kontrollerade robot med Arduino och T.V. remote

Bygga en modulär Robot chassi med Actobotics

Enkla objekt undvikande med Arduino

Enkla ljus söker robot med 555 timing IC

Bygga din Internet kontrollerad Video-Streaming Robot med Arduino och Raspberry Pi

Autonoma Sumo bekämpa Robot med pneumatiska Flipper - hur man

Gör en Wi-Fi styrd Robot med en LinkIt

Hur till spår din Robot med OpenCV

Hinder att undvika Robot med arduino

Arduino 4wd robot med ping sensor "J-Bot"
