Fånga rörelse med en Arduino Accelerometer w / XBee Comms (11 / 12 steg)
Steg 11: Rörelsedetektorn

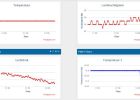
Detta steg beskriver hur registeransvarige beslutar vilken typ av rörelse som händer. Genom provning, är var fast besluten att, som refererade från viloläge, detta är det mönster som registeransvarige rörelse följer. (G = större, L = mindre, S = samma)
Ideal: 510, 497, 627
Höger 611, 492, 521... G, S, L
Lämnade 408, 496, 530... L, S, L
Vidarebefordra 512, 598, 526... S, G, L
Omvänd 514, 395, 536... S, L, L
Vad detta säger är att, till exempel i ordning för det för att vara motion till höger, X behandlingen måste vara större än tomgång, Y läsning måste vara om samma och Z läsning måste vara mindre än tomgång. Samma slags logik följer för andra typer av motion. I följande kod använder programsatsen switch/fall enkel logik för att fastställa förslaget. Standardskiftläget är förklarar ett "fel" och inte skicka en motion om av någon anledning accelerometern är inte upptäcks eller förlorat.
fall 0:
LCD.Clear(); lcd.setCursor(0,0);
LCD.Print("Move"); lcd.setCursor (0, 1);
om (xRaw > idleX & & yRaw > idleminY & & yRaw < idlemaxY & & zRaw < idleZ) {
LCD.Print("Right");
}
annars om (xRaw < idleX & & yRaw > idleminY & & yRaw < idlemaxY & & zRaw < idleZ) {
LCD.Print("left");
}
annars om (xRaw > idleminX & & xRaw < idlemaxX & & yRaw > idleY & & zRaw < idleZ) {
LCD.Print("forward");
}
annars om (xRaw > idleminX & & xRaw < idlemaxX & & yRaw < idleY & & zRaw < idleZ) {
LCD.Print("reverse");
}
annat {
LCD.Print("Idle");
}

ARD-e: roboten med en Arduino som en hjärna

Styra en kamera med en Arduino och RS232 sköld

Motion Tracker med PIRs, Arduino och en Servo

Köra en stegmotor med en Arduino

Lägga till knappar i din X52-Pro Joystick med en Arduino mikro

Lär dig mer om rörelse med ljus målning

Enkel Remote Data plottning med Android / Arduino / pfodApp

Spåra din bil med en Arduino-baserad Lojack

Låg höjd miljöövervakning med en Arduino baserade väder Instrument och Aeropod Remote Sensing plattform

Skicka sensordata (DHT11 & BMP180) till ThingSpeak med en Arduino, använder ENC28J60 Ethercard

Kontrollera en stegmotor med en Arduino

RFIDuino - med en Arduino & RFID-läsare för att göra ett pussel GeoCache

Styra en Schlage elektroniska deadbolt med en arduino!

Göra en bärbara streckkodsläsare med en arduino och en cuecat
Skicka sensordata (DHT11 & BMP180) till ThingSpeak med en Arduino, via kabel eller WiFi (ESP8266)

Hur man gör en trådbunden Rc bil med en Arduino

Hjälp med min arduino projekt. (2, 7 segment med piezo summern och relä)

Behandlingen digitalt skjutmått med en Arduino / USB
