Göra en 3D-skrivare med en CNC router - "Deltabot" (23 / 26 steg)
Steg 23: Testa rörelse

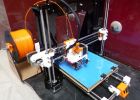
Med allt trådbunden upp, är det dags att testa förflyttning av delta 3D-skrivare.
Testa funktionen homing. Med strömmen, flytta alla vagnarna till mitten. Tillämpa makt till skrivaren och navigera menyn på LCD-skärmen på "Förbered" sedan till "Auto Home".
Om en transport börjar flytta ner, tryck på knappen "Stop" på kretskortet LCD. Slå av strömmen. Vänd stegmotor runt och slå på strömmen igen. Testa rörelse med den "Auto hem" igen. Se till att hålla din hand på stopp-knappen. Stoppa maskinen om transport kraschar genom gränsbrytare.
Om datorn kraschar, dubbelkolla dina inställningar för configuration.h. Ändra storlek parametrar eller kanske vända viss logik som konfigurera något från "false" till "true". Eller kanske en rad kod behöver kommenteras ut (/ /) som kommandot kommandot för en dra upp motstånd.
Configuration.h behöver finjusteras senare med alla peculiars i deltat, men för nu, bara att få riktningen av reser rätt och få maskinen att stoppa på slutet stop sensorer är tillräckligt. Jag fortfarande faktiskt lära sig konster och knep Marlin firmware, så förlåt mig om denna del av den instructable saknas. Jag kommer fortsätta uppdatera denna kompatibel som lär dig mer.

Anpassade trä skyltar gjorda med Shopbot CNC Router
Gjuten Cement Mountain skulpturer med en CNC Router

DIY gitarr med min diy cnc router

Kastar en konkret lampa skulptur med en CNC frästa styrofoam mögel

Sko bänk gjord med CNC Router och Laser

Sunglass fall - 3D ytbeläggning med CNC Router

Bygga en CNC router
Hur du exporterar en Autodesk Inventor del för en ShopBot CNC router

Alla metall Mega 3D-skrivare med alla acme stavar (Prusa i3 bas)

Kontrollera en 3D-skrivare med gester
Byggnaden prusa i3 3D-skrivare med direkt extruder

Bygga en lugged cykel med en CNC dirigeras Rama in jiggernaut
DIY delta 3D skrivare med låg kostnad återvunnet delar

Fly Fishing Rod arrangör med CNC Router

Skrivbord-höjd skåp gjorda med CNC Router

Hemgjord X Y Z axel bild av Aluminium för DIY-Laser 3D-skrivare CNC Router Mill maskin

Komplett nybörjare steg för steg, 3D-skrivare med alla delar listor

Använder en GDI-skrivare med GNU/Linux
