Humanoid Robot härmar mänskliga (2 / 4 steg)
Steg 2: Konfigurera maskinvara

Detta steg kommer en att ta lite tid för att slutföra. Jag antar du använder Robophilio robot kit för detta Instructable, men samma koncept fungerar för någon robot.
1. börja med rensning ut Robophilio och ta ut sitt lager kretskort. Använda Philips skruvar för att öppna upp på baksidan av den. För alla andra robot som bara ta ut sin huvudsakliga styrkort. Kom ihåg att dessa robotar har en galen antal servon. Robophilio, eller en humanoid robot, kommer med ett datablad som visar var varje servo är ansluten på lager kretskortet. När du tar varje servo kabel ut, göra säker du kommer ihåg vilken servo som kabel tillhör, kommer annars ni att gå igenom massor av tester för att se vilken kabel går till vilken servo.
Jag skulle föreslå att använda något system för att märka varje servo kabel som det tas. Jag använde helt enkelt maskeringstejp. Jag tejpade en liten bit på varje kabel och märkt det med servo det hörde hemma också. Så för den vänstra axeln servon skrev jag "L axeln",
Nästa ta ut batteriet som är framsidan roboten (dolt i området grenen av roboten).
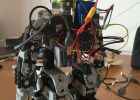
2. start genom att ta en liten skärbräda och fästa batteriet leder, positiva och negativa, att det set av brödunderläggen. Sedan ansluta alla positiva servo kabel till batteriet positiva kraftledningen. Göra det samme för marken. Sedan ansluta servo kabel signal raderna till lämpliga Arduino stiften. Schematiskt diagram visar alla. Du kan också ta en titt på koden för att se vilka servo är kopplad till vilken Arduino stift.
Om du har Robophilio: koden jag har gett redan hanterar grader för varje servo och dess min/max.
Om du inte har Robophilio sedan starta genom att också skapa den grundläggande kretsen som beskrivs ovan. När du har gjort det måste du manuellt testa varje servo genom att tilldela det värden att räkna ut dess min/max. Jag skulle föreslå flytta servon i steg om 5 grader till räkna ut exakta värden. Detta är en ganska grundläggande steg och jag kommer inte gå över den alltför mycket i detalj.
3. nu när du har allt gjort för robotarnas sida. Anslut din Microsoft Kinect till datorn och kontrollera att du har alla rätt drivrutiner du behöver att fungera.

Att göra en lowcost humanoid robot tillverkad i PVC vattenledning material (uppgradering)

Att göra humanoid robot

Humanoid Robot tonande kontrolleras med Arduino Mega, raspberry Pi och 1Sheeld
Hur man bygger en Raspberry Pi noll Humanoid Robot med Java

Billig autonoma Humanoid Robot

3D tryckt Humanoid Robot för under 1000.00 USD

Baserade Arduino humanoid robot med servomotorer

P.H.R eller personliga Humanoid Robot

Humanoid Robot huvud: InMoov

Hur man gör en enkel Humanoid Robot som kastar

Gör en enkel tvåbent Humanoid Robot (Servo Walking Robot)

Arduino Robot som undviker mänskliga

ROBOT kontrollerad av mänskliga fingrar

Kartong Humanoid Robot

Robbie - din egen anpassningsbara Humanoid assistent!

Soccer playing Robots

Halley: Ambassadör Robot 001

Arduino autonom Robot (Land Rover / bil) Stage1Model2