Hur man gör en avlägsen kontrollerade Robotic Hand med Arduino (4 / 5 steg)
Steg 4: Krets av Robotic Hand







För banan, kan du välja att använda en servomotor sköld för Arduino UNO (Sök på eBay eller Amazon) med en XBee sköld, eller göra en egen sköld (jag ska göra en så snart som möjligt) med modulen XBee och stift för servomotorer och driva Arduino UNO av dess jack port.
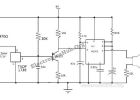
DIY XBee sköld gjorde jag använder ett 12 KOhm motstånd och ett 22 KOhm motstånd, kan du se ledningarna i bilder.
Så jag använde vad jag redan hade köpt innan, men du kan använda allt som låter dig styra servomotorer och XBee.
Servomotorer har 3 trådar:
- gul: signal (ansluta till en digital pin);
- röd: power (+ 5 V);
- brun: jord (GND).
Så nu inte kommer att du göra misstag :)
Jag använde den enklaste typen av servomotor, arbetar på 5 V, med en roterande vinkel på 180 grader (det är den perfekta vinkeln, vi behöver inte mer).
USB-portar på en dator kan inte ge anough makt att styra 5 servomotorer, så jag föreslår för att använda en 12V strömförsörjning att testa allt och sedan använda 9V batteri (alkaliska föredras).

Hur man gör en avlägsen kontrollerade leksak för barn

Avlägsen kontrollerade robot med mobila video inspelningen

Avlägsen kontrollerade robot med Arduino och T.V. remote

Mobil kontrollerade robotic bilen med arduino och DTMF

Avlägsen kontrollerade växla med Atmega 328p

Utmana avlägsen kontrollerade Robot
Hur man använder en Force känsliga motstånd med Arduino

Bygga en alla SOLAR avlägsen kontrollerade båt RC båt med Solar Attic Fan delar - Rescue Boat -

Lätt naturen gjorde avlägsen kontrollerade lampa!

Avlägsen kontrollerade Pan och Tilt huvud

Avlägsen kontrollerade korg Ball Robot - HARLEM GLOBETROTTERS -

80cm trasiga LED-TV förvandlats till 50W avlägsen kontrollerade ljuslåda

Avlägsen kontrollerade grävmaskin

Avlägsen kontrollerade Bluetooth bil
Avlägsen kontrollerade larm krets

Avlägsen kontrollerade Titanic papper

Avlägsen kontrollerade dörrlås
Avlägsen kontrollerade ubåt / undervattens ROV
