LEAP rörelse kontrollerad Remote Search och bortskaffande Robot (3 / 5 steg)
Steg 3: Bygga/ledningar instruktioner
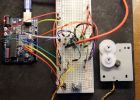
4 GPIOs av Raspberry Pi nämligen GPIO 9, 11, 23 & 24 är anslutna till L293D Motor Driver IC som driver motorerna därmed efter mottagande makro begär från webbsidan betjänas av den Webiopi ramen. Med USB WiFi dongle och USB Logitech Webcam är anslutna till 2 USB-portar på Raspberry Pi. En 5V 4000 Mah Power bank levererar huvudströmmen till Pi. En 4V 1.5a leda Acid batteri används för att driva motorerna.
Obs: Eftersom den maximala tillverkade strömmen av power banken jag använde var en measely 1000 Mah, jag var tvungen att använda externa leda syra batteriet för att driva motorerna. Om du har en power bank som ger > = 2000Mah, kan du direkt köra motorerna från 5 v järnväg på Pi (jag inte skulle rekommendera detta för makt hungriga motorer men)
De 3 viktigaste underavsnitten av projektet LeapMotion Javascript API, WebIOPi och MJPG-Streamer och deras grundläggande arbetande/setup beskrivs kortfattat nedan.

IoT rörelse kontrollerad servon

Rörelse kontrollerade ljusshow

Skapa din egen rörelse kontrollerade robot
Lysa upp en LED med Leap rörelse på Mac OSX (för nybörjare)

Rörelse kontrollerad ultraljud lampa

Hercules: Rörelse kontrollerade Android roboten

Bomb bortskaffande Robot simulering

Upp och upp - Robot balansera Revisited

Rörelse kontrollerad RGB ledde kostym med Xbox 360 Kinect, Max MSP och Arduino Del1

Raspberry Pi Google kalender med rörelse kontrollerade webkamera och väder

Bygga ett Portal torn med rörelse kontrollerade ljud och belysning

K-9 2.0. WiFi kontrollerade och autonom Robot hund.

Rörelse kontrollerade utlopp

Rörelse kontrollerade Outlet - från en rörelse sensing ljus

Gitarr "Stoppa Box" remote volym och döda växla

DIY mottagare kontrollerad Switch (billigt och enkelt)

Cell Phone kontrollerade remote airsoft granat detonator
ARDUINO stegmotor kontrollerad med rotationsencoder och l293d eller SN754410NE chip
