Linjära klockan (11 / 22 steg)
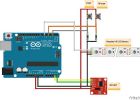
Steg 11: Prototyp version - elektroniska bitar


Det är enkelt. Jag gjorde några förlängningskablar med vissa 4-pin huvuden eftersom steppers har jag råkar redan har lite kontakter monterade, och trådarna på dem är mycket liten och skör ändå.
Jag kan inte ge en bra introduktion till steppers här (inte bara för att jag inte vet mycket om det själv), men ungefär: varje stepper har två spolar i den, och pulserande dessa två spolar i en viss sekvens och polaritet (fyra steg) gör rotorn slår i en viss riktning. Två spolar är separat i en bipolär stepper som jag använder, så jag har fyra kablarna kommer ut ur motorn. (Faktiskt jag har fem, eftersom detta är konstigt, men jag klippte bara en av dem..) Den exakta motorer jag har här är mycket samma typ beskrivs enastående detaljerat i denna lysande instructable.
Två sladdar kommer att anslutas till en av spolarna och de andra två kommer att anslutas till den andra spolen. Använda en multimeter kontrollera kontinuitet att räkna ut vilket. Anslut sedan ett par att mata terminal 1 och 2 i en av motorshield hamnar, och andra par 4 och 5. Om du inte vet Stifttilldelningar för din stepper, du kanske har fått det rätt, eller kanske du har en av spolarna bytt polaritet. http://Digital.ni.com/public.NSF/allkb/0AEE7B9AD4B3E04186256ACE005D833B har en liten guide om det.
För att testa programmet utan att behöva vänta en minut mellan varje fysisk fästing, ändra värdet millisPerSecond i programmet till 200 - detta kommer att köra fem gånger snabbare än vanligt. Du kan också ändra stepSize som kommer att ändra hur många steg motorn tar per fästing.
Linjära klockan med hjälp av Arduino + DS1307 + Neopixel: återanvändning av någon maskinvara.

Lunchtid klockan

Musik CD + CD-täcka - klocka ALARM

Nintendo Entertainment System patron klocka

Inbyggd klocka hylla

3D tryckt roterande klocka

3D Rainbow klockan

Bågskytte ansikte klockan

Montering av "Kloka klockan 2" (Arduino-baserad väckarklocka med massor av extra funktioner)

BookClock - Arduino-baserad klockan i en kartong

CD-klockan

Coffee Cup klockan

Färg provet klockan

Cup klockan

DIY Infinity spegel klockan

Hellschreiber klockan

Pussel klockan

LED belyst trä bröllop klockan
