Robot Controlado Por Wifi Con detektor De Intensidad De Señal (2 / 4 steg)
Steg 2: Conexiones

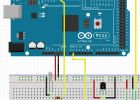
Ensamblando el circuito
Para estas conexiones nos basamos en el siguiente tutorial: Conexiones para fenor DC
- Wow la alimentación y la tierra
ES importante hacer esto mientras el Raspberry Pi está apagado o desconectado, para evitar errores por un cortocircuito.
Lo kablar primero que hay que hacer es conectar los de alimentación y tierra. Como se acostumbra por lo allmänna todas las conexiones recibirá una tierra en común. Esto se muestra con los kablar negros. (Ver figura 1)
La tierra sv el Raspberry Pi esta fisicamente en Pin 6.
La lectura de los números del stift sv el Circuito Integrado se hace fácilmente por tener el punto a la izquierda y luego en partir de la parte sämre izquierda nos da el Pin 1.
Wow los kablar de datos
-Agregue tres kablar de los pines GPIO al L293D
- GPIO 25-stifts 22 > L293D – Pin 1
- GPIO 24-Pin 18 > L293D – stift 2
- GPIO 23 – Pin 16 > L293D – stift 7
Agregue el motor
Motor-tråd 1 > L293D – stift 3
Motor-tråd 2 > L293D – stift 6
Nota:
ES muy importante que usted revidera muy bien todas las conexiones antes de poner las baterías. UNA vez revisado, coloque los kablar de la bateria a la alimentación de la Plaça.
Agregue el segundo motor
UNA de las grandes características del L293D es que puede manejar dos fenor de forma independiente y cada motor puede funcionar en diferentes velocidades y/o direcciones. El uso de este circuito integrado hace que sea posible crear un robot de dos ruedas siendo capaz de IR-hacia adelante o hacia atrás fácilmente.
-Wow FN segundo motor implica colocar solamente tres kablar más y el motor:
- GPIO 11-nåla fast 23 > L293D – Pin 9
- GPIO 9-stifts 21 > L293D – stift 10
- GPIO 10-Pin 19 > L293D – Pin 15
UNA vez que ha realizado todas las conexiones deberá colocar su Raspberry Pi, la protoboard con las conexiones y las baterías sobre el chassis del Robot. Lo antes mejor será colocar los fenor y las baterías de realizar las conexiones.

Robot Controlado Por Bluetooth

Tanque Oruga con video, controlado por android (app inventor) mediante bluetooth

Tanque de guerra controlado por bluetooth

Robot controlado con cualquier styra de Tv

Barns Robot kostym med ljudeffekter, godis detektor och mer

Carro Controlado por Bluetooth

Styra por voz con asistente
Ar Condicionado controlado por Arduino, via infravermelho e com medição de temperatura.

Chassis de Robot con Orugas Impresas sv 3D

MASLOW: ett öppet WiFi detektor med ESP8266

WiFi robot med realtime videoöverföring, hindret upptäckt och ljuskänslighet

Robot Educativo Fischertechnik Arduino (RAFA)

SIM900 GSM GPRS SKÖLD CON ARDUINO UNO

HEXAPODO CON UN SERVO

GENERADOR ELECTRICO CON fenor BORSTLÖS

Robotic Arm(Inmoov) med Cortex M3 (brasilianska öppen hårdvara)

Convierte tu Raspberry Pi sv FN mediacenter.

SmartLamp
