Rundstrålande & Mecanum hjul (1 / 4 steg)
Steg 1: Hur du använder rundstrålande hjul? (4 hjul-läge)





Med fyra rundstrålande hjul på en robot, placerad i enlighet med diagram och hantera rotationshastighet av varje av dem, kan vi göra roboten flytta i någon riktning. Den animerade bilden visar de grundläggande rörelserna som erhålls genom att kombinera hastighet och riktning av rotation av dessa speciella hjul; dessa de redan kunde vara nog, men de möjliga kombinationerna är faktiskt obegränsad. Detta händer eftersom, för att beräkna hastigheten och banan för robot rörelserna, måste vi beräkna resultanten av hastighet vektor summan av hjulen och ögonblick summan av dem: om de båda noll, roboten flyttas längs en cirkulär bana med en radie av större eller mindre beroende på vilka kombinationer vi väljer; i stället om hastighet summan är lika med noll, och ögonblick summan inte är kommer att roboten rotera på sig; medan om ögonblick summan är lika med noll och hastighet summan inte är, då roboten kommer att göra en rätlinjig rörelse. Naturligtvis, i verkligheten dessa rörelser är närmade till varandra eftersom det är svårt att ha alla fyra hjulen på en idealisk position och det är också svårt att få dem att flytta med perfekt hastighet: dessa approximationer orsaka fel som i de flesta fall kan ignoreras, men du bör ha det i åtanke om du behöver precisa rörelser. Detta är våra #ThunderRobot som använder fyra av dessa hjul: titta på videon.

OmniWorm: en rundstrålande Robot Inchworm

5 GHz Coax rundstrålande antenn
Rundstrålande Biquad antenn för 5 8 GHz FPV
Rundstrålande Biquad antenn för 2 4GHz

DIY rundstrålande löpband med Wiimotes

Hemmet gjorde Mecanum hjul

Trådlös - rundstrålande antenn Plus + 10Db - Antena Omni Potencializar

Hur man gör en All-riktning fordonet med Mecanum hjul

Rundstrålande DisCone HDTV antenn
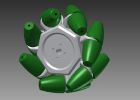
Mecanum hjul
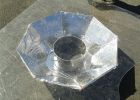
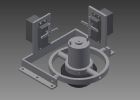
Hur man skapar en rundstrålande sol spis!

Dålig Piggies rundstrålande helikopter

Rundstrålande signalering med EL Wire

Rundstrålande Blixtspridare
HOG hjul

Hur man gör en Mecanum Robot med fjädring

Mecanum hjulet robot - bluetooth kontrollerad

Bygga din egen Mobility Rehab handikappade Scooter för mindre än $500
