Tornerspel Robot (LabVIEW kod)

Detta instructable kommer att gå över den LabVIEW kod som jag skrev att styra en tornerspel robot. Detta är en djupgående förklaring av koden. Om inte du är intresserad av förklaringen, kopplas den LabVIEW VI det sista steget.
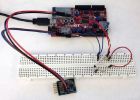
För robot använde jag två kontinuerlig servon, en styrspak, en accelerometer, en mini servo och en kraft sensor. Jag använde även LabVIEW fysiska Computing Kit som innehåller LabVIEW hem bunt och chipKIT WF32. För att kommunicera med WF32 över dess inbyggda WiFi, använde jag LabVIEW MakerHub LINX. För att se en delar notering, kolla tornerspel robot ledningar tutorial.
Den övergripande idén till detta projekt var att skapa en robot som kunde kontrolleras över WiFi och skicka data tillbaka till LabVIEW. För det första skulle det finnas en setup stat där kan du ställa in vinkeln på "lance" monterad på en servo med Pmod styrspaken. När en knapp på PmodJSTK sköts, skulle roboten ange ett körtillstånd. I detta tillstånd skulle den servomotorer pågå tills en kraft var kände eller om roboten plockades upp. När roboten plockades upp, återställs staten till setup staten om inte fanns 3 tornerspel rundor, i vilket fall, tornerspel sessionen skulle sluta.
Roboten har tre hit-poäng till att börja med och varje gång under i kör staten om kraften som går över ett visst värde, hit-poäng minska med ett. Om de hit-punkterna minskar till noll, kommer att tornerspel sessionen avslutas.
Kolla in detta Instructable på ledningarna för roboten och kolla in detta Instructable för att se hur du sätter samman 3D tryckta delar.

Tornerspel Robot (ledningar Tutorial)

Styra servon via Bluetooth (RN-42) och LabVIEW

Bygga tornerspel robotar

Analoga Discovery 2 USB oscilloskop + LabVIEW

Hinder undvika Robot

Orm spel med poäng i LabVIEW

Analoga Discovery™ USB oscilloskop + LabVIEW

Visa väder och läge med chipKIT WF32 och LabVIEW
Hur du använder I2C i LabVIEW

Hur du använder SPI i LabVIEW

Termistor - Fan Speed Control med LabVIEW och myRIO

LabVIEW handledning: Spel rabatter

LCD-kontroll med LabVIEW

Hur du använder UART i LabVIEW
Plug and Play-Pmods med LabVIEW

Robot Arm Arduino App

Termistor - Fan control med LabVIEW

Med en Raspberry pi för att styra en WF32 med LabVIEW (Fan Control)
