Autonoma vägg kramas Arduino fordon (2 / 7 steg)
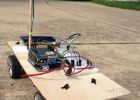
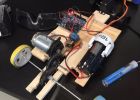
Steg 2: Plattform omkonfigurering

För detta Instructable behöver du en liten ändring till "Autonoma Sentinel Arduino bilen".
Flytta de ultrasonic sensorn från pan servo församling och fixa det till framsidan av bilen så den står alltid inför framåt.
ELLER ännu bättre, hänga en andra ultrasonic sensor (de är billigt) på framsidan så att du slipper göra hårdvara omkonfigurering när du byta program.
Du kan också montera en enkel (inte sammansatta) infraröd sensor fram istället. Om du gör det, måste du göra vissa ändringar av kodning eftersom jag har koden föreskrivs en front ultraljud. Utan tvekan IR-sensorn är bättre lämpad för "nära i" avstånd mätningar, men jag har skapat detta Instructable att använda exakt samma komponenter som på den ursprungliga plattformen.
Denna plattform gör inte användning av "laserkanonen" av "Autonoma Sentinel Arduino fordonet".

Autonoma Sentinel Arduino fordon

1Sheeld kontrolleras Arduino fordon

Autonoma Tank med robotarm (Arduino, Bluetooth)

WiFi / Internet / Android kontrollerade Nerf Vulcan Sentry Gun

1Sheeld styrda robotarm
Arduino Powered autonoma fordon
Arduino autonoma fordon

Autonoma Arduino bil

Swarmbots: Autonoma Arduino bilar som spelar musikaliska stolar

Grunderna i förvandlar ditt Remote Controll fordon till ett autonomt System (Drone) genom att använda en Arduino

CARduino - Arduino-drivna, LabVIEW-kontrollerade fordon

Arduino autonom gräsklippare som CutFlower

Autonoma Arduino bil med infraröd närhets-Sensor

Arduino autonom Robot (Land Rover / bil) Stage1Model2

Autonoma Arduino Rover 5

RC bil till autonoma Arduino Robot

Autonoma Autonavigation Robot (Arduino)

Arduino baserade Robotic Car(wireless controls+Autonomous)
